大成建設は、自動運転レベル4の社会実装の拡大を見据え、トンネル内など特徴の少ない区間で生じやすい走行方向の車両位置の誤差を、インフラ側から効果的に補正する位置推定技術「T-Localizer」を開発した(ニュースリリース)。
自動運転では、変化する周囲の状況をリアルタイムに認識しながら、移動中の車両位置を高精度に把握することが不可欠。自動運転レベル4の走行手法としては、主にレーザー光による測距技術のLiDARと高精度3D地図を用いる方式などが採用されている。
これらの方式は、自動運転に特化したインフラ設備を事前に用意する必要がないなどの利点がある。一方、周辺環境が単調・広大で変化に乏しい長大トンネルや森林区間では、これらの方式では車両位置の誤差が蓄積し、自動運転による走行が困難になり自動運転停止に至るといった課題が残されていた。
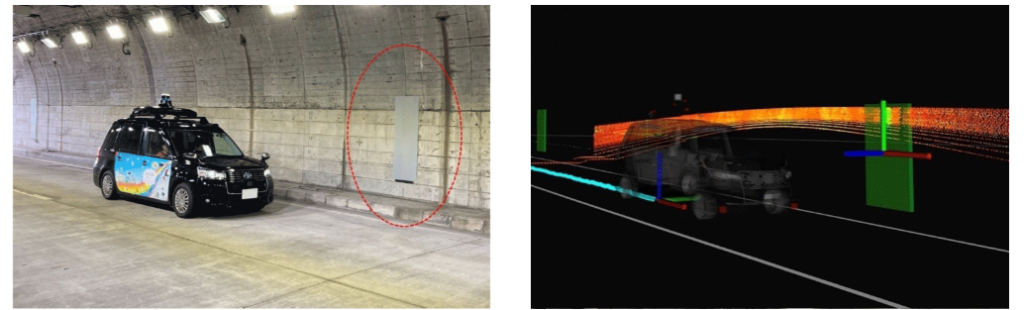
そこで同社は、ティアフォーとの共同研究により、自動運転車両に搭載されているLiDARが検出可能な特殊塗料を塗布した反射体をトンネル壁面などに一定間隔で設置することで、車両位置の誤差を補正し、安全な無人自動運転を実現する位置推定技術「T-Localizer」を開発した。
この技術は自動運転車両が搭載しているLiDARを用いて、トンネル壁面などに設置された反射体を検出し、3D地図上に定義された当該反射体の位置情報と推定した車両位置を照合することで位置誤差を補正する。このため、新たなセンサの付加など車両側の改良が不要で、車種を問わず容易に適用することができるという。
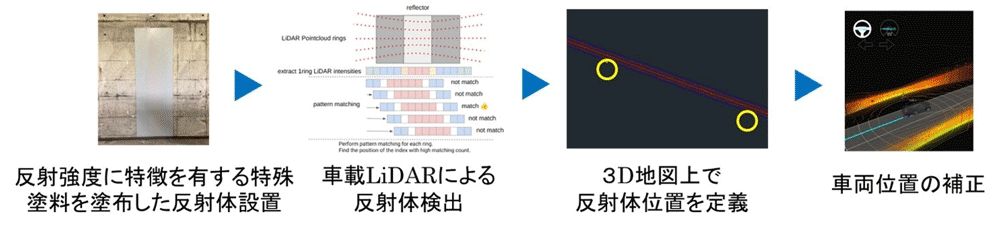
また、自動運転車両の位置に誤差が生じやすいトンネルなどにのみ、壁面などに一定間隔(例:80m)で反射体を配置することで、車載LiDARが反射体を検出して正確な位置情報に補正し安定走行が可能となる。そのため、特殊塗料塗布量も最小限のインフラ改良で導入できるとしている。
さらに、反射体は特殊塗料を用いて壁面に直接塗布するため、低コストかつ施工が容易で、既存構造物にも対応可能。摩耗の影響を受けにくく、約10年間塗り替え不要で、メンテナンス性にも優れている。特殊塗料・施工については、当社グループの大成ロテックと連携して実施しているという。
今後同社は、「T-Localizer」を積極的に提案し、公共交通の人手不足解消や安全・安心な運行を促進することで自動運転レベル4の社会実装をインフラ側から支援していくとしている。