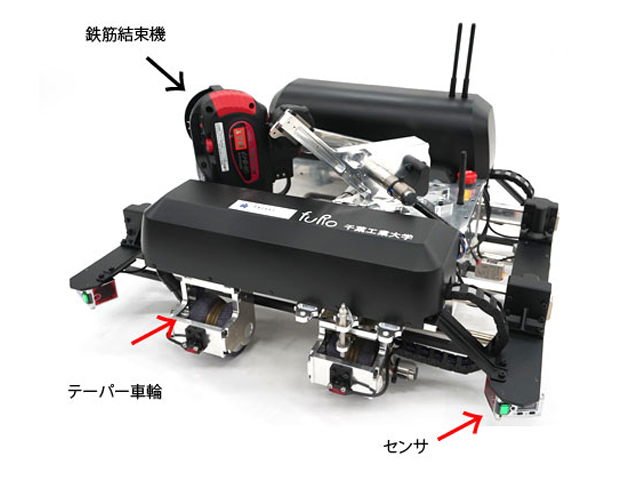
 千葉工業大学は,大成建設と共同で,自動で鉄筋を結束する自律型鉄筋結束ロボット「T-iROBO Rebar(ティーアイロボ・リバー)」を開発した(ニュースリリース)。
千葉工業大学は,大成建設と共同で,自動で鉄筋を結束する自律型鉄筋結束ロボット「T-iROBO Rebar(ティーアイロボ・リバー)」を開発した(ニュースリリース)。
建造物の骨組みを構築する鉄筋工事は,従来より作業の効率化や生産性の向上が求められており,技能労働者(鉄筋工)の高齢化や労働力不足などの課題も顕在化している。
そこで,千葉工業大学と大成建設は,鉄筋工事のうち約20%程度の割合を占める鉄筋結束作業(交差する鉄筋を針金等で留める作業)について,自動で鉄筋結束と移動を繰り返す自律型ロボットを開発した。
このロボットは,本体に搭載された2種類のレーザセンサーを用いて,鉄筋交差部の検出と周辺障害物の検知を同時に自動で行なうことにより,ロボット位置を高精度に決定し,自動鉄筋結束機を用いて正確に鉄筋の結束を繰り返す。
また,新しい移動機構の採用により,自律して鉄筋上を安定して移動することができ,鉄筋結束時に本体がぶれない。仮設置時の配筋誤差を吸収する機構により,鉄筋配置に合わせて円滑に移動することができる。
このロボットの活用により,鉄筋結束作業を正確に繰り返すことができるようになり,作業の省人化・効率化による生産性の向上とともに,技能労働者(鉄筋工)の身体的負担の軽減,労働力不足による事業遅延等のリスク低減が可能となるとしている。
今後,2018年度から本ロボットを本格的に現場導入し,ロボット本体の性能や使いやすさ,耐久性など機能の向上を図り,鉄筋結束作業の省人化・効率化による鉄筋工事の生産性向上を目指す。