2.2 ハイパースペクトルデータの構築技術
LVBPFを用いて取得される1枚の画像には,分光方向に空間情報が混在している。そのため,各波長に対応した分光画像を得るには,撮影位置の異なる画像を複数枚取得し,それらを合成する必要がある。この点では,スリット分光器を用いた方式と同様に,プッシュブルーム撮影が必要となる。一般的なプッシュブルーム撮像では,一定間隔で取得した画像を時系列に基づいて順次合成するが,レンズ歪み,撮像位置における視差,姿勢不安定性などの影響により,画像間の位置ズレが生じる。その結果,単純な時系列合成では,生成されたハイパースペクトルデータに歪みが残り,各分光画像が正しく整列しないという問題が生じる。
この問題に対処するため,本研究では,粗補正と精密補正の二段階からなる画像補正手法を提案する4)。第一段階では画像間の大まかな位置ずれを補正し,第二段階では残留する歪みや非線形な位置ずれを精密に補正することで,高精度に整列したハイパースペクトルデータを生成する。
第一段階は,粗補正を目的とした処理である。まず,特徴点マッチングにより各画像間の重複領域を自動検出し,画像間の変位を推定した上で,アフィン変換による位置合わせを行う。ここで用いる画像は,LVBPF型ハイパースペクトルカメラによって取得されたRAW画像であり,各画素に対応する透過波長を示す波長マップが付随している。これらのRAW画像は,レンズ歪みや視差の影響を含む未処理データである。特徴点マッチングは,最初の画像と次の画像の間で実施し,得られた対応関係に基づいてアフィン変換を適用する。波長マップについても,画像と同一の変換行列を用いて変換を行う。この処理をすべての取得画像に対して繰り返すことで,アフィン変換後のRAW画像と対応する波長マップを三次元構造として格納し,概ね整列したハイパースペクトルデータを構成する。
しかし,アフィン変換による粗補正のみでは,視差等に起因する非線形な歪みを完全に補正することはできず,画像間には微小な位置ズレが残る。そこで第二段階として,精密補正を行う。第二段階では,第一段階で生成されたハイパースペクトルデータ間で改めて特徴点マッチングを行い,抽出されたすべての特徴点対を用いて,RANSAC(Random Sample Consensus)によりホモグラフィ変換行列を算出する。RANSACは,外れ値を含むデータから頑健にモデルを推定するための反復的アルゴリズムである。基準画像を除くすべての分光画像に対してこのホモグラフィ変換を適用することで,位置ズレと歪みを同時に補正する。その結果,歪みのない,精密に整列したハイパースペクトルデータが得られる。
2.3 軌道上での比較実験
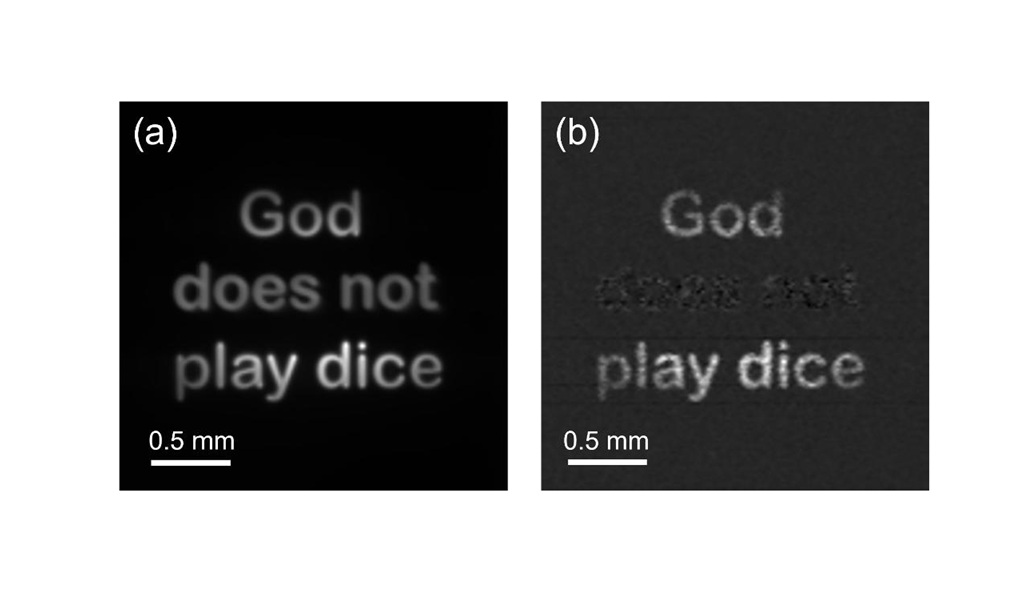
提案するハイパースペクトルデータ構築手法の有効性を示すため,以下の複数の手法を比較した。⑴一定の時間間隔で順次合成する手法,⑵アフィン変換のみを用いる手法,⑶ホモグラフィ変換のみを用いる手法,⑷アフィン変換とホモグラフィ変換の両方を組み合わせた本研究の手法である。図2には,各データ構築手法によって生じる位置ずれの例を示す。本検証に用いたデータは,3U級超小型衛星TIRSATによる軌道上観測データである4)。TIRSATには,本研究で開発したLVBPF型ハイパースペクトルカメラが,軌道上実証用のサブペイロードとして搭載された。検証データセットには,カザフスタン付近で観測されたハイパースペクトルデータを用い,3か所において赤・緑・青バンドの重なり具合を4手法で比較した。その結果,中央位置図2(b)では,いずれの手法においても比較的良好な位置合わせが得られた。一方,他の位置(図2(a)および(c))では,提案手法を除くすべての手法において顕著な位置ずれが確認され,各バンドが正しく重ならなかった。これにより,本研究で提案した手法の有効性が示された。

3U級超小型衛星TIRSATによる検証結果(観測:2024年12月16日05:55:12 UTC,カザフスタン)(文献4を一部変更)