筑波大学は、生物の目の仕組みから着想をえた「イベントカメラ」を用いた非接触の振動計測手法を開発した(ニュースリリース)。
振動計測は、構造物の安全性評価、製品設計、産業診断、材料科学など、科学と工学の幅広い分野で重
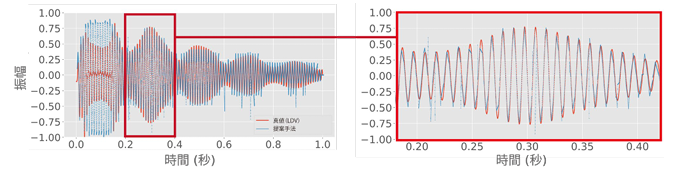
要な役割を果たしている。その中でも、測定対象に触れることなく振動を計測できる非接触計測は、対象の振動特性に影響を与えることがないため、正確な測定が可能。代表的な非接触計測装置であるレーザードップラー振動計(LDV)は、高精度な計測ができるが、装置が非常に高価で装置や測定対象の配置などのセットアップも複雑なため、利用環境が限られていた。
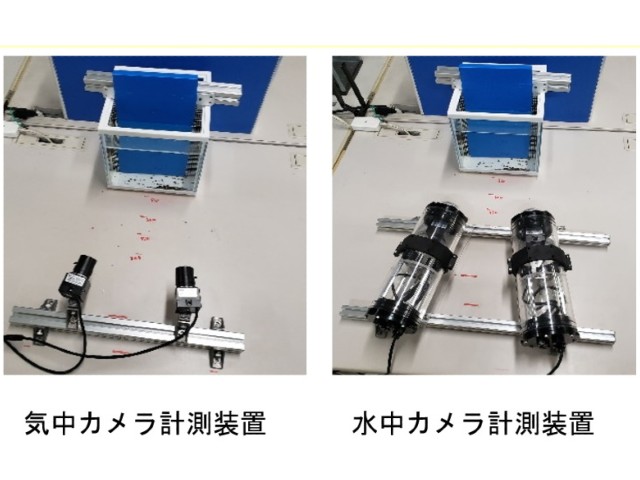
このため、安価な代替手段として高速カメラを用いた計測方法が検討されてきた。しかし、単位時間当たりの撮影コマ数(フレームレート)を高くすると露光時間が短くなるため、十分な光量を確保するために非常に明るい補助照明が必要となる。また高速読み出しの制約から、空間分解能が犠牲になる場合があった。
そこでこの研究では、イベントカメラに注目した。イベントカメラは画素ごとに独立して(非同期で)明るさの変化を記録する。このような非同期動作により、100万分の1秒の精度での高い時間分解能が得られ、さらに高い空間分解能を維持したまま記録することが可能となる。さらに、広いダイナミックレンジにより、さまざまな照度条件下でも安定した計測が行なえる。しかし、イベントカメラのみを用いた従来の手法では、振動の周波数は再構成できても、振幅・位相を正確に復元することは難しいことが課題となっていた。
この研究では、日常の室内照明と同程度の一般的な照明環境下において、振動する対象物の周波数と振幅の両方をイベントカメラのみを用いて記録できる非接触振動計測手法を開発した。イベントカメラから得られるデータは、画像のような格子状の情報ではなく、「いつ」「どこで」明るさが変化したかを表す多数の点の集まりとして得られる。このため、イベントカメラから得られるデータ(イベントデータ)は、時間と空間に分布した点群のようなデータとして捉えることができます。従来の手法では、こうした点群データを一度画像などの他の形式に変換して解析することが一般的でしたが、このような変換では、振幅の正確な復元が難しくなる。
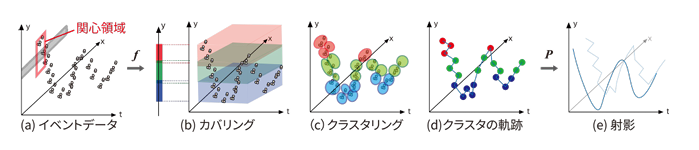
この研究では、点群として捉えたイベントデータの幾何学的な構造に着目した解析手法を提案した。振動に由来するイベントを安定して抽出し、背景ノイズの影響を抑えるため、まず記録したイベントデータから、イベントが最も多く発生している位置を中心として、振動方向に沿った関心領域(ROI)を自動的に決定する。振動には複数の周波数成分が含まれるため、イベントデータの発生密度は時間や空間によって大きく変化する。
このような密度のばらつきに対応するため、研究では、時間や位置が近くに集中して発生しているイベントデータを一つのグループとして捉えつつ、その密度が場所や時間によって異なる場合にも自動的に対応できる、階層的な密度ベースクラスタリングを用いて、イベントデータを複数のまとまりに分類した。得られた各クラスタを時間と空間に分布した点の集合として幾何学的に捉え、その中心位置(重心)を計算した。それらを時間方向に接続することで、振動による位置の変化(変位)を軌跡として再構成した。
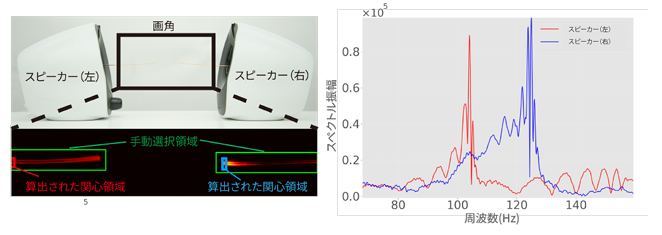
そして、この軌跡を振動方向と時間の平面に射影することで、最終的な振動波形を得た。この結果、従来手法では困難であった振幅の計測が可能となり、周波数・振幅・位相を高精度に推定できることを確認した。さらに実験では、一台のイベントカメラのみを用いて、複数の音源に由来する振動を同時に分離して記録できることも実証した。この手法により、イベントカメラのみを用いた手軽で高精度な非接触振動計測が実現した。
この手法は、カメラに対して横方向の振動成分については有効に計測でるが、カメラの光軸方向に対する振動成分の計測については、さらなる工夫が必要となる場合がある。この点に対しては、ステレオイベントカメラを用いた処理の導入などが有望な方向性として考えられる。今後は、構造物の安全性評価や音響フィールドの再構成など、より実世界に近い応用場面での検証を進め、この手法の有効性と適用範囲を明らかにしていく予定だとしている。