1.はじめに
土木施工の現場では,少子高齢化を背景に人手不足が深刻化しており,熟練技能の継承も課題となっている。これらに対して,建設機械メーカやゼネコンを中心に,施工の遠隔化・省人化・自動化の取り組みが継続的に進められている。一方で,土木施工の自動化は,すでに高度に自動化されている機械加工に比べて条件が複雑であり,一般に難易度が高い。その理由は,対象が均質で環境も整えやすく加工プロセスをモデル化しやすい機械加工と比べ,土木施工の対象である地盤は現場条件が空間的・時間的に変化しやすく,前提条件を固定しにくい点にある。
土木施工では,土質は施工地点や深度によって異なり,同一現場でも地層が変われば性状が変化する。ボーリング調査等により事前把握は行えるものの,地層の変化は空間的に一様ではなく,局所的な変化や不確かさが残る。また,土質は天候や含水状態の影響を受け,同じ場所でも時間的に条件が変化し得る。さらに,土質によっては建設機械の出力が不足し,予定した土量の掘削が成立しない場合もある。加えて,施工現場では機材・資材の位置が工事進捗に応じて移動し,障害物配置が固定されないことが多い。建設機械についても,バケット先端に代表される刃先の三次元位置を外界基準で常時高精度に把握することは容易ではないことや,作業員との建設機械の作業エリアの分離が難しく,安全確保の観点でも課題が多い。
そのため,土木施工の自動化では,変化する現場を都度計測し,地形,障害物,機材位置といった状態を更新するための三次元計測技術が重要となる。
近年,自動運転を始めとする自動化技術を背景に3D LiDARの量産と競争が進み,センサの小型化・低価格化が大きく進展した。これにより,従来は台数や搭載スペースの制約から難しかった複数台配置や機上搭載が現実的になり,現場の死角低減や出来形把握のための三次元計測を導入しやすくなっている。
このような背景の下で,筆者らは,施工空間が限定され環境の管理が比較的行いやすい対象として,ニューマチックケーソン工法(Pneumatic caisson method:PCM)に着目し,3D LiDARを活用した自動化の研究を行ってきた。PCMの概略図を図1に示す。
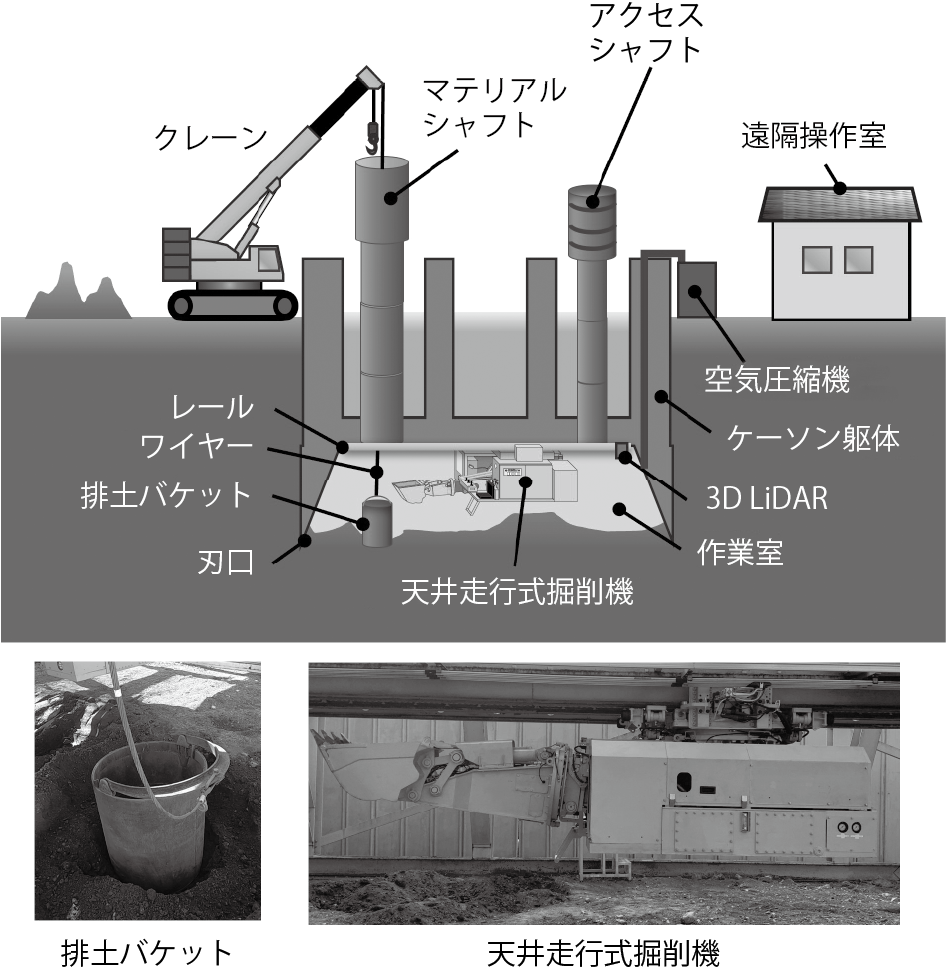
PCMは,ケーソン下部の土砂を除去することでケーソンの自重により躯体を沈下させ,所定深度まで到達させる工法である。
PCMで使われる掘削機は地上の操作室から操作できる遠隔操縦装置が,最初から組み込まれているため,既存のシステムをほとんど変えることなく制御システムを組み込むことが容易である。PCMでは,作業室内で掘削された土砂を函外に排出するため,排土バケットに土砂を投入し,クレーンにより吊り上げて排出する。
本稿では,筆者らの研究グループで実施しているPCMにおける事例を通じて,建設分野におけるLiDARの導入・活用例を紹介する。
【月刊OPTRONICS掲載記事 】続きを読みたい方は下記のリンクより月刊誌をご購入ください。
】続きを読みたい方は下記のリンクより月刊誌をご購入ください。
本号の購入はこちら