1.はじめに
ロボットハンドで物体をピックアップする際には,視覚センサーと触覚センサーを組み合わせて用いる方法が一般的である。近年では,これら二つのセンサー情報を基に,生成AIを活用して作業を行う試みも盛んに行われている。その結果,洗濯物を畳む作業や,テーブルを拭く作業といった複雑な軌道を伴う作業も,ロボットで実現可能となってきた。
一方で,依然として未解決の課題も残されている。具体的には,1)物体をつかむ直前,いわゆるラストワンインチで生じる位置誤差の問題と,2)物体との高速接触時に発生する衝撃力をどのように緩和するかという問題である。見落とされがちだが,ロボットの腕や手は多くの部品が金属で構成されているため,人の手と比べて重量が大きく,慣性モーメントも大きくなる。その結果,物体に触れる瞬間に衝撃力が発生しやすいという特徴がある。
製造現場における手作業では,作業の速さと確実性の両立が求められる。そのため,これら二つの課題は,ロボットによる自動化を進めるうえで致命的な障害となる。特に,光学レンズのように傷つきやすいデリケートな物品を扱う工程では,レンズの形状や配置位置に応じてロボットハンドの位置や高さを微調整しながらピッキングすること,レンズとテーブル面との接触を検知して丁寧に静置する動作などが求められる。これらはいずれも,現在のロボットにとって難易度の高い作業である。
こうした未解決問題の解決を目指し,著者の小山は,電気通信大学,東京大学,大阪大学における研究活動を通じて,約14年間にわたり近接覚センサーの研究開発を進めてきた。
近接覚センサーとは,ロボットハンドの指先表面,あるいは指内部に搭載されるセンサーで,計測面に向けて赤外光を照射し,その反射光強度から距離や位置情報を取得する技術ですある(図1)。近接覚センサーの活用方法は大きく分けて二つあり,1)非接触センシングと,2)接触センシングである。
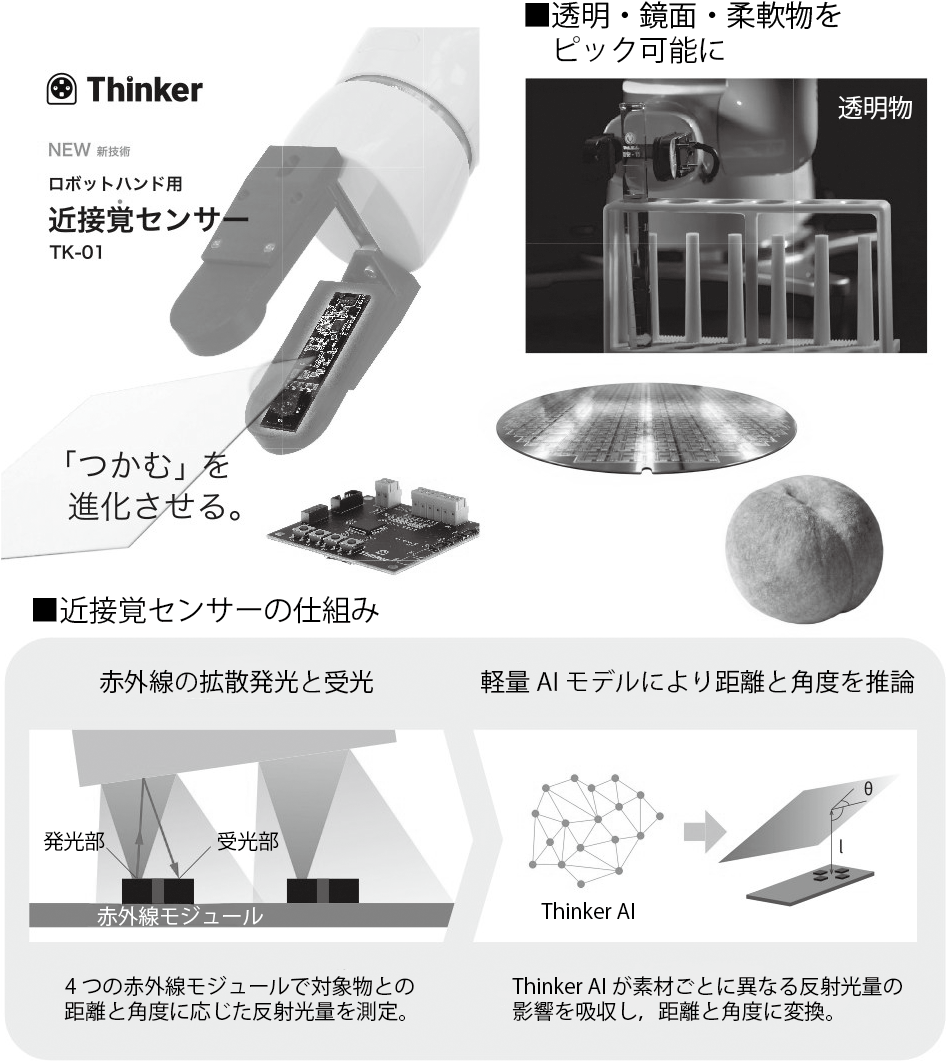
まず,1)非接触センシングでは,ロボットハンドの指先表面に近接覚センサーを搭載することで,物体に触れる前から物体表面を計測し,非接触で位置決めを行う。ハンド指先と物体面との位置関係を直接計測するため,対象物がデリケートな物体であっても,力を加えることなく正確に把持することが可能となる。
次に,2)接触センシングでは,柔らかい構造を持つハンド指内部に近接覚センサーを配置し,一種の接触・力センサー系を構成する。指内部の変形を近接覚センサーで計測することで,物体と指先が接触した瞬間の検知や,把持力の調整を行うことが可能となる。
これらのセンシング手法は大学で研究開発が進められてきたが,2022年8月には,大学で培った近接覚センサーの技術シーズを基にThinkerを設立し,近接覚センサーの製品化を実現した。
本稿では,近接覚センサーの概要を簡単に紹介した後,特に2)接触センシングが可能なロボットハンド製品であるThink Hand Fに焦点を当て,製造現場で導入実績のあるレンズの微調整ピッキング,丁寧な静置作業,ならびに検査作業について紹介する。
【月刊OPTRONICS掲載記事 】続きを読みたい方は下記のリンクより月刊誌をご購入ください。
】続きを読みたい方は下記のリンクより月刊誌をご購入ください。
本号の購入はこちら