成長市場としてロボットが大きな注目を集めている。今回そのロボットで使われる光技術のトレンドを探るべく,「2019国際ロボット展」(2019年12月18日~21日 東京ビックサイト)にて取材を行なった。
成長市場としてロボットが大きな注目を集めている。今回そのロボットで使われる光技術のトレンドを探るべく,「2019国際ロボット展」(2019年12月18日~21日 東京ビックサイト)にて取材を行なった。
ロボットにおける光技術の最大のアプリケーションは,ロボットの眼となるセンシングだろう。中でもバラバラに置かれた部材をロボットがそれぞれ拾い上げ,種類ごとに規定の処理を行なうバラ積み3Dピッキングは需要も大きく,光学センサーはそれぞれの部材が重なっている順番や向き,方向,種類を3Dで認識することが求められる。
バラ積み3Dピッキングには,部材の上方から幾何学的な光のパターンをプロジェクターで投射してカメラで撮影し,パターンの写る様子から3D情報を得る方法や,ステレオカメラによる認識が多く使われている。しかし,これらの方法はロボット上部に大型の装置を必要とし,また,カメラに写らない側面などの情報は得られなかった。
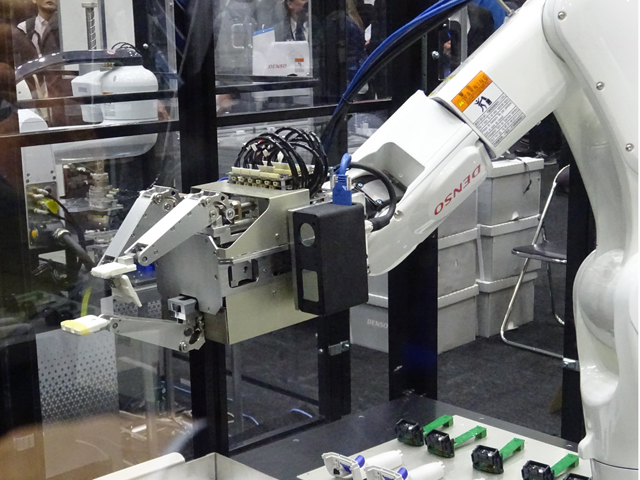
今回リコーインダストリアルソリューションズは,2018年に発表していた小型レーザースキャナの試作機を完成させ,デンソーウェーブなどが開発したロボットアームに取り付けたデモを行なっている。スキャナはVCSELとMEMSを用いた光学系により光学系を小型化し,ロボットアームの先端に搭載を可能にした。

サイズは95×57.5×35mmで重量は200g。主な仕様は視野角が水平28°×垂直21°,計測範囲は170mm,1560×1160のイメージセンサーにより奥行精度は64μmとなっている。VCSELは50チャンネル,1軸のMEMSミラーは同社の自動車向けHUDのものを流用している。ロボットハンドの先に「眼」を付けたことで,従来固定されていた視点を多視点とすることができ,ピッキングにとどまらず,検査などにも利用が可能となる。
VCSELとシンプルな光学系によりスペックルノイズをキャンセルし,ロバストにも優れる。ただし,現在のところ画像の取得に1秒ほど必要なため,その間はロボットを停止させる必要がある。まだ具体的な量産計画は無いものの,市場を調査しながら2021年度には製品化に漕ぎつけたい考えだ。

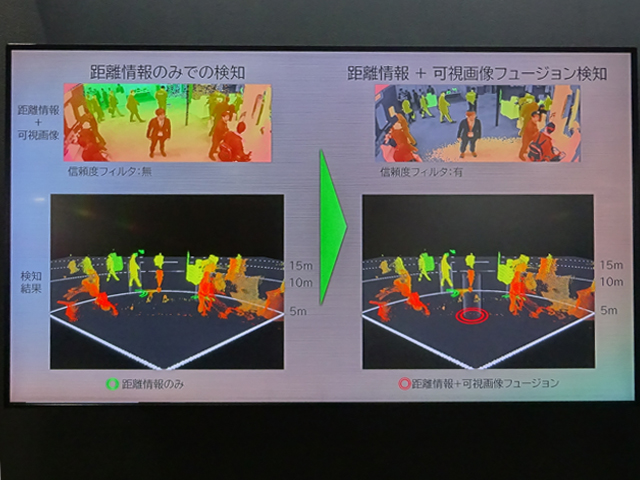
パナソニックは2018年のCEATECに出品したLiDARを刷新した試作品を展示している。これはカメラによる2Dのイメージ画像とフラッシュLiDARによる3D画像を同一の光学系によって得ることができるもので,同社が内製する可視からNIRまで感度のある解像度640×240のイメージセンサーを用いている。
2Dと3Dの画像をキャリブレーションすることなく重畳することが可能で,例えば手前の障害物と一部が重なり,3D画像では検出できない人物像でも2D画像であれば検出できる。画像認識を併用することで,これまでのLiDARでは不可能だった反射率2%程度の物体も検出可能。10m以下における検出距離誤差は1%未満となっている。
今回の試作機のサイズは70×70×47mm。VCSELを用いた光源部分が2018年モデルよりも大幅に小さくなった。視野角は水平120°×垂直45°。フレームレートは12~24fps,測定距離は反射率30%で20mとなっている。データ処理のエッジ側/PC側などを含め,多くの仕様についてはニーズに合わせた変更が可能とする。
同社では2018年モデルについては評価モデルの出荷を行なっており,このモデルについても来年春には評価モデルを出荷し,2021年中には量産化したいとしている。アプリケーションについてもロボットに限らず,自動車の近距離用センサーも狙っていきたい考えだ。
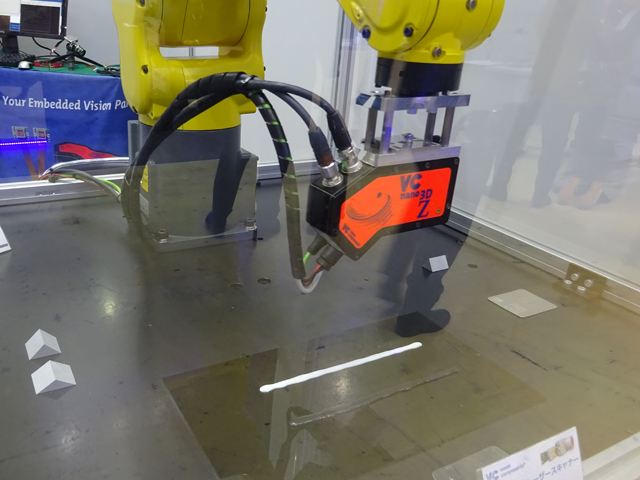
センサーからのデータ量が増え,さらにAIによる処理が重なるとPC側の処理が非常に重くなる。そこでセンサー(エッジ)側でのデータ処理が求められている。独Vision Componentsのレーザースキャナー「VC nano 3D-Z」は,ライン状の高輝度青色レーザーとスマートカメラを用いた光切断法により,ロボットハンドに搭載してワークや塗膜の厚さなど微細な高さを計測する。
内蔵したFPGAでデータを処理することで,3D点群データを1Gb/sイーサネットで出力できるので,後段の処理が大幅に軽量化される。アプリケーションのサイズに応じた製品をラインナップしており,デモを行なっている製品の最小解像度は60μm(X方向)および10μm(Z方向)となっている。

クラボウはケーブル認識に特化した高速3Dビジョンセンサーのデモを行なっている。ステレオカメラを用いて3D計測を行なっており,計測トリガをが入力されると,ワークであるケーブルの掴む位置や掴む姿勢,最適な経路をロボットに伝えるので,CADによるマッチング不要となる。
また,開発品としてロボットハンドに取り付け,コネクタピンの種類をエッジ側で判別するAIカメラも出展している。サイズは150×80×40mmで,FPGAを搭載したカメラ単体で画像処理を完結し,結果はイーサネットで出力する。こうした前段の処理をデバイス側で行なうことによって,後段の処理負荷を減らそうとする提案が随所で見られた。

レーザー加工ロボットではファナックが3KWファイバーレーザー「FF3000i-MODEL A」を高精度ロボット「M800iA/60」と組みわせ,肉厚1.2mmの曲げ加工済みSPCCに対する穴あけ加工のデモを行なっている。従来のロボットによるレーザー加工は精度においてもう一つというのが一般的な評価であったが「それを覆したい」(担当者)と,このシステムでは加工精度0.1mm以下を実現している。
それでも加工速度と精度では一般的なレーザー加工機に分があるものの,例えば曲げ板に対する穴あけといったプリケーションでは,先に穴を開けてしまうと曲げ加工によって穴に歪みが生じることがある。しかし3D加工が可能なロボットを用いればこの工程を逆にして後から正確な穴あけができるといった,3D加工ならではのメリットがある。
また,一般的なレーザー加工機は曲線部分の切り抜きにおいて動作速度が落ちるため熱が入りすぎることがあるというが,同社のロボットならば動作速度に合わせてレーザーの出力を調整することで均一な加工ができる。これは,レーザーからロボット,ソフトウェアまでを社内製品で一気通貫できる同社ならではの強みと言える。同社は現在,新たにトレパニングヘッドによるリモート溶接も開発しており,ロボットによるレーザー加工のバリエーションを広げたい考えだ。
少々毛色は異なるが,福井大学ブースでは若狭湾エネルギー研究センターが開発したクローラ式小型レーザー除染ロボットを展示している。これは若狭湾の耐用年数を超えた原発が解体されるのに際し跡地の除染を目的に開発されたが,福島第一原発での使用ももちろん念頭にある。

従来の放射能に汚染されたコンクリートの床面の除染は研磨剤を吹き付けるブラストによって行なわれてきたが,作業時に発生する二次廃棄物が問題となるほか,汚染された研磨剤自体がコンクリート面に食い込んでしまうという問題があった。
開発したロボット無線操縦式で,300Wレーザーを用いて床面をアブレーションする。この作業はフード内で行なわれ,飛散物は集じん機によって回収される。除染能力は3.6m2/h,深さ0.1mmとなっている。同センターと福井大学では協力し,このロボットの効率的な使用方法を研究している。また,床面以外の放射能汚染された廃材については,ベルトコンベア上で同様の除染をする方法も試しているという。
少し前まで開発段階であったバラ積み3Dピッキングや2D LiDARはすでに広く普及しており,優れた日本のロボットに応用すべく海外からも多くのベンダーが出展していたのが印象的であった。今後はそこにAIによる処理が大きな役割を果たそうとしており,そのためにエッジ側での処理やデータの軽量化がデバイスにも求められている。また,開発におけるロボットSIの役割も大きくなっており,デバイスの性能だけではなく,ソフトウェアやアルゴリズム,伝送方式など,トータルした「使いやすさ」が求められる時代となったようだ。