宇宙航空研究開発機構(JAXA)は、国際宇宙ステーション(ISS)「きぼう」日本実験棟 船外実験プラットフォームのポート共有実験装置(MCE)ミッションの一つとして実施した「EVA支援ロボット実証実験(REX-J)」において、テザー(紐)制御によるロボットの空間移動技術の実証に成功した。
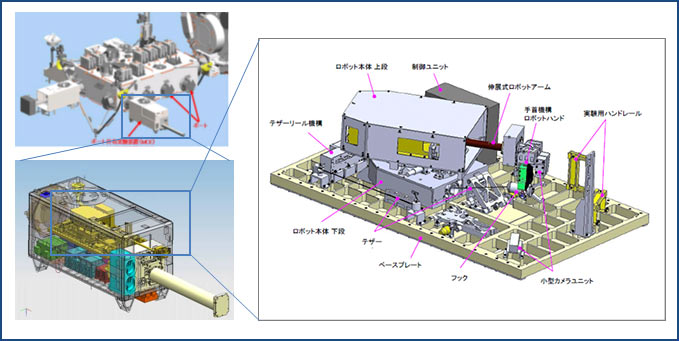
ロボットに内蔵した伸縮自在のロボットアームとロボットハンドを使って、テザー先端のフックをハンドレールに取り付け、4本のテザーで支持し、テザーの長さを制御してロボットを移動させたところ、世界初となるロボットの自己取付けテザーによる移動技術の実証に成功し、小型のロボットで大型構造物上を空間移動する方式の軌道上確認と構成要素の特性データを取得するというミッション目的を達成することができた。
詳しくはこちら。