─市場投入の予定は?
我々のLiDARは,既に交差点などで実装されています。自動車向けでは2024年にContinentalが製品として量産を開始する予定なので,実際に搭載した自動車が見られるようになるのはそれからになります。具体的には,トラックの場合は2年サイクルで新製品が出るので2024年,乗用車は3年サイクルなので2025年が一つの目安になります。現状はメーカーが既に実証試験を行なっている段階にあります。
─仕様を公開しないのは何故でしょうか?
他のメーカーのLiDARは決まったスペックしか無いのに対し,我々のLiDARは顧客の要求に応じてスペックを定義できるというのが,はっきりとした仕様を公開しない理由の一つですが,自動車や他のアプリケーションでも,それぞれの顧客が必要とする情報の公開には応じていますし,もちろんここで各パラメーターの最大のパフォーマンスを言うこともできます。
ただ,その製品が何をしたいのか,どういった性能が欲しいのかで要求される数値は変わってきます。例えば高速道路での自動運転でも,乗用車とトラックでは要求されるパラメーターが違います。主なパラメーターとして,繰返し周波数,解像度,検出距離がありますが,これらはトレードオフの関係にあるので,全てを最大値にすることはできません。例えば解像度を上げれば繰返し周波数は下がりますし,検出距離を優先すれば解像度が下がります。さらにはフレーム毎に必要なパラメーターが変わってくるということもあります。

─1km先の検出が可能とは驚きました
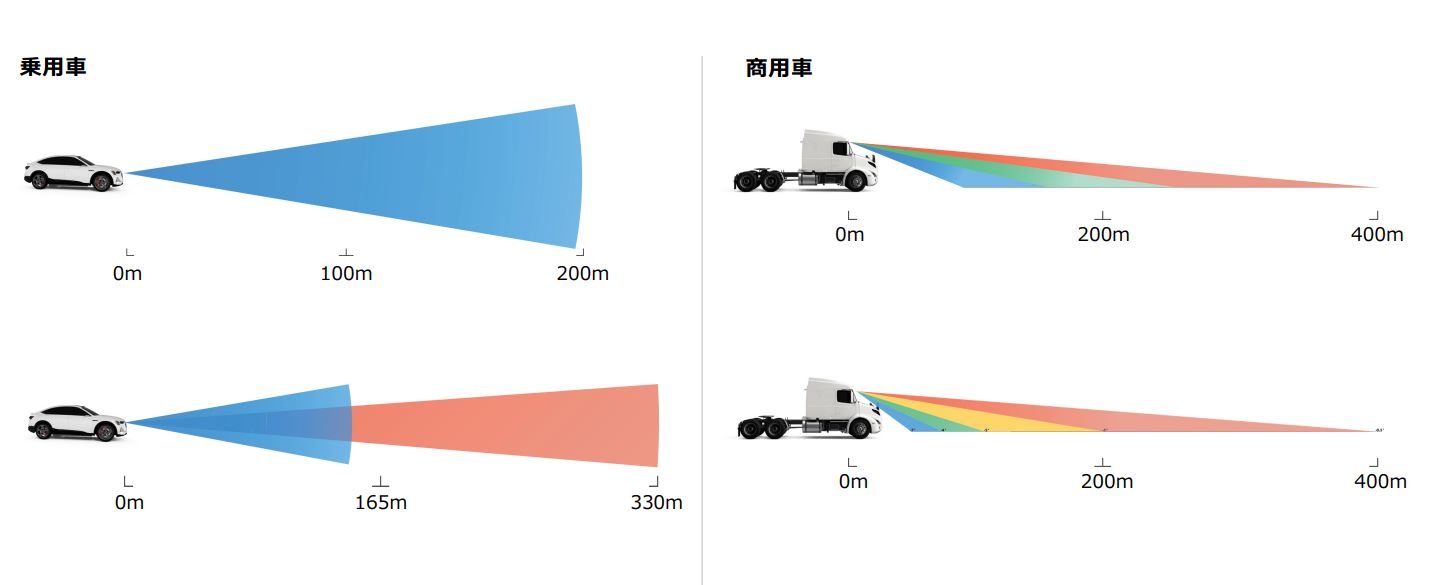
理論的にはそれ以上見ることもできます。我々のLiDARは遠くを見る場合,地平線付近の解像度を上げて,手前の解像度は落とします。高速道路と市中では注意するべき位置も見る点も違ってくるので,LiDARもパラメーターの構成が異なってきます。我々のLiDARは10個くらい異なるモードがあって,モードによって仕様を構成していきます。ほとんどのOEMが望む最も密度が高い部分の角度分解能は0.1°×0.075°ですが,我々のLiDARは0.025°×0.025°まで分解能を上げられます。さらにトラックの場合は0.01°×0.01°も可能で,これによって350m先まで見ることができます。
ただし,検出距離が長いほどフレームレートは遅くなります。弾丸のトラッキングはLiDARを22kHzで動作させましたが,速度を上げるために部分的に解像度を犠牲にしています。つまり,FOVは光学的には最も広く固定しておいて,そこから必要な領域だけを見ています。弾丸のトラッキングは実際にはアプリケーションとして入れているわけではありませんが,実験的にはこういうこともできるということを示したものです。
─レーザーやその走査方式について教えてください
使用しているレーザーの波長は1550nm,出力は1W以下で,走査は2枚のMEMSミラーをX,Y軸で高速に振動させて行なっています。ミラーの直径は0.8mm~1.6mmで,LiDARのMEMSミラーとしては最小サイズです。他社は5mm~10mm,またはガルバノミラーやポリゴンミラーを使っていますが,これらに比べてはるかに小さく高速なので,自動車の振動による共振周波数の影響も受けにくくなっています。
さらに我々のLiDARの特徴として,光路を出射と受光で分けているという点があります。軍用のLiDARには測定対象が近すぎると飽和によって見えないという問題がありました。これを解決するために光路を分けていますが,この構造によって遠くの対象物からの戻り光を待たずにミラーを動かせるので高速で動作できます。また,ガラスなどの干渉も減るので,例えば車内にLiDARを設置して窓越しに計測ができます。そしてレーザー光源を小さくしながらレシーバーを大きくできるので,遠くまで見ることができるのです。