 SteraVisionは,世界で初めてスキャナーの可動部を一切なくし,量産性を向上させたソリッドステートLiDARを開発した(ニュースリリース)。
SteraVisionは,世界で初めてスキャナーの可動部を一切なくし,量産性を向上させたソリッドステートLiDARを開発した(ニュースリリース)。
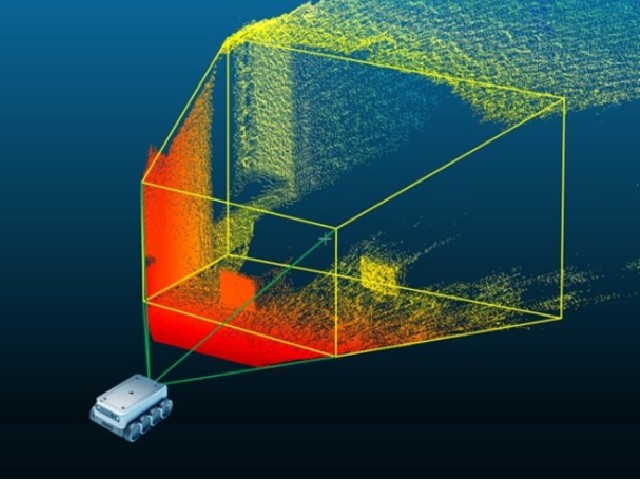
自動運転の実現を支える技術としてセンサー技術(LiDAR)が注目を集めている。
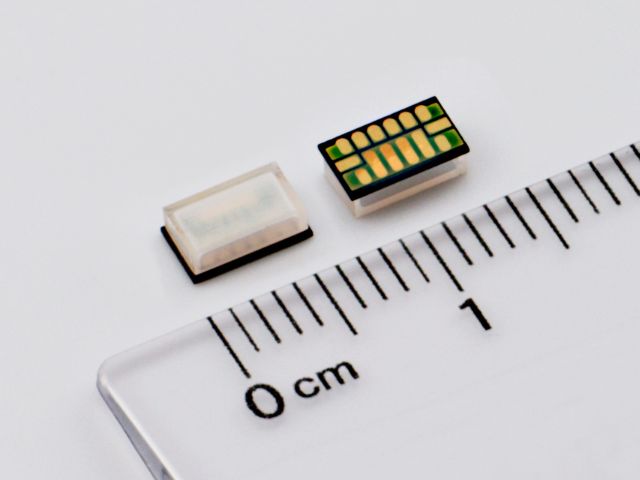
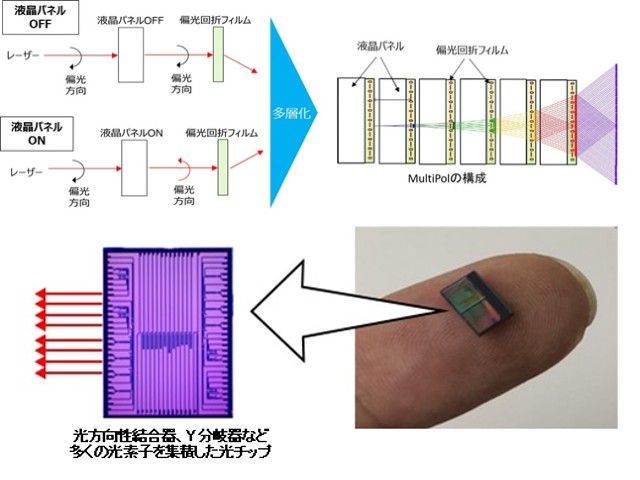
今回,開発したソリッドステート光ビームステアリング素子「MultiPol」によって,多ビーム同時走査となるマルチスキャン化をした。これは,液晶を用いて光の偏光をスイッチすることで,光ビームを上下(左右)に高速スイッチする方式。機械的に可動させるアナログなスキャンから,可動部が一切なくデジタルにスキャンできるソリッド・ステートスキャナーを実現した。
このシステムでは2波長のビート信号を用いたDualビート方式により,長距離高精度測距を行なう。これは,二つの波長を用いて,その差分のビート信号を検出することで振動に強い距離・速度計測が実現する方式。
今回,ToFではなく光の波の性質を利用した方式(FMCW)を開発したことで,遠方や濃霧,煙など,いわゆる”霧の先”の物体検出と速度の直接検出を可能にした。これまでFMCWのボトルネックであった小型化・高性能化を実現するため,多くの光部品(光方向性結合器,Y分岐器など)を1チップに集積。これにより,同時に多くの光ビームをスキャンでき,小型化・低価格化が可能だとする。
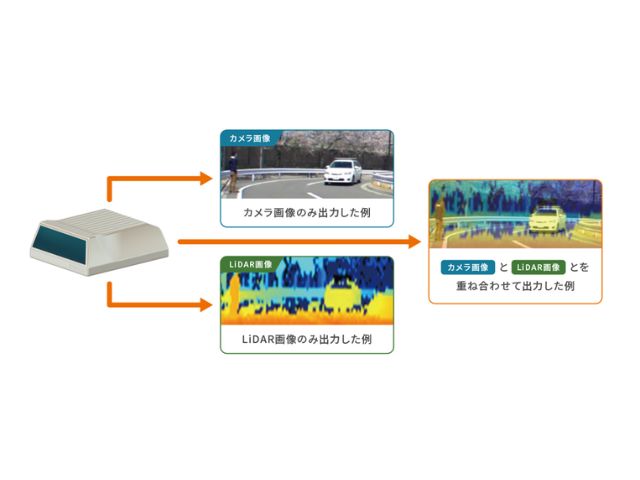
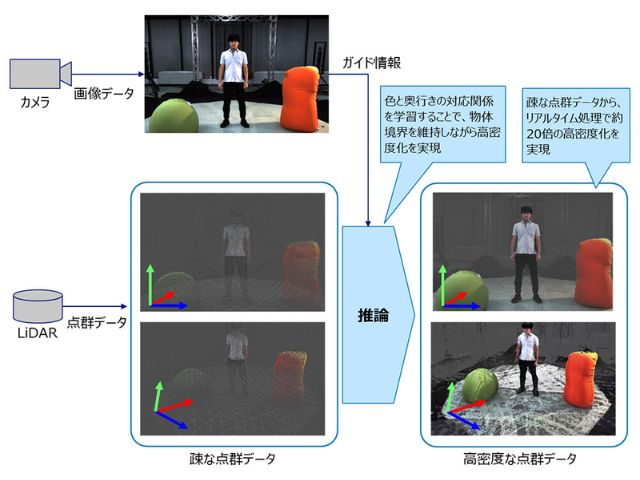
併せて,人間の視覚のように前方のシーンから重要な部分を選択的にピックアップして認識する「無意識AI」を取り入れた「Autonomous Scan」を開発した。従来はLiDARとカメラは独立したセンサーだったが,今回,LiDARによる物体検出とカメラ画像の自動運転車向け認識(パーセプションAI)を融合した。
これにより,カメラ画像だけでは検出困難な遠方や“霧の先”の重要な物体を,パーセプションAIの指示のもと選択的にLiDARでスキャンし,物体を検出・追跡する。光ビームを一筆書きでアナログに操作し全シーンを計測した後にフレームをリフレッシュするこれまでの方式から,選択的に抽出した重要なシーンの計測後直ちにフレームをリフレッシュできるため,高速での追跡を実現した。
このLiDARを用いることで, “見たいところを好きなだけ詳しく見る”人の目のような効率的な視覚システムが可能となる。道路や交通状況を把握して早めに対処する「予知運転」の実現により,燃費向上による15.2%のエネルギー削減にもつながるという。同社は今後,さまざまな分野の顧客ニーズにあわせソリッドステートLiDARの性能をチューニングし,今年の7月頃からサンプル出荷を進めていくとしている。