 国立天文台(NAOJ)は,はやぶさ2探査機の探査機軌道を,LIDARから得られる測距データと,ONC-W1(光学航法カメラ)から得られるイメージトラッキングデータを用いた力学的な軌道決定によって改良した(ニュースリリース)。
国立天文台(NAOJ)は,はやぶさ2探査機の探査機軌道を,LIDARから得られる測距データと,ONC-W1(光学航法カメラ)から得られるイメージトラッキングデータを用いた力学的な軌道決定によって改良した(ニュースリリース)。
力学的な軌道決定とは,探査機の外力による加速度を時々刻々見積もり,観測値とできるだけ矛盾のないように探査機の軌道を推定する方法。
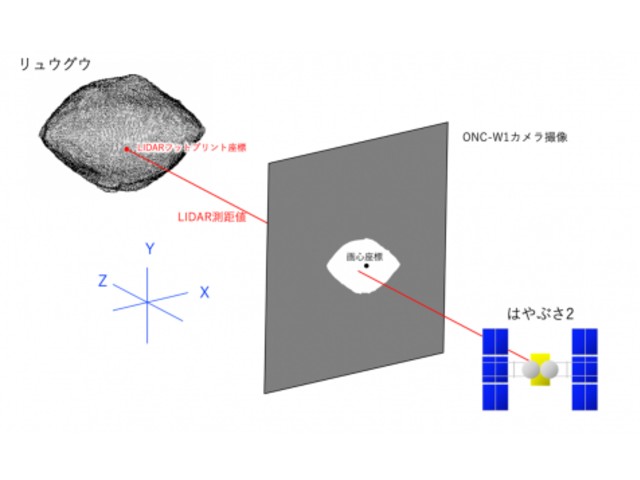
イメージトラッキングデータは,ONC-W1の撮像の画心座標を表すデータ。カメラによる撮影では,リュウグウ表面が白く(明るく),影や宇宙空間は黒く(暗く)写る。明るい部分の座標の平均値が画心(輝度中心)座標であり,これにより,カメラが宇宙空間のどちらの方向を向いているかがわかる。
また送信データ量が多く,通信容量の制約から限られた時刻でしか利用できない撮像データに対してデータ量も少なく,より多くの時刻で利用できる。
今回,測距データとイメージトラッキングデータを用い,3次元空間における探査機の初期位置と速度を推定した。LIDARを用いた探査機の位置の推定には,LIDARのビームがリュウグウ表面に当たる位置の中心座標(フットプリント)が必要。この推定には,LIDARで計測された測距値をリュウグウ表面の地形に沿うように当てはめて求めた。
力学的な軌道決定において精度を得るためには,軌道計算で使われる加速度のモデルの精度も重要となる。リュウグウ近傍では,重力加速度,太陽輻射圧による加速度が大きな影響をおよぼすが,これらの加速度の計算に使われるパラメータを改良することで精度を向上できる。
研究では,軌道推定の過程において,リュウグウのGM(万有引力定数とリュウグウの質量の積)の値および太陽輻射圧モデルの補正係数(計算に使用しているモデルを何倍すれば良いかという補正値)も同時に推定された。推定されたGM値は,ソフトウェアで推定された結果と誤差の範囲内で一致し,初期の太陽輻射圧モデルに対する補正係数も推定された。
フットプリントの推定に測距値の地形の当てはめる方法では,よく似た別の場所の地形に当てはめてしまう場合があった。測距値に加えてイメージトラッキングデータ用い,力学的な軌道推定をすることによって,こうした間違いを修正することができたという。
この方法は,将来の小天体のミッションに対しても,精密な軌道を得るために役立つことが期待されるとしている。