─AQUADJASTの具体的な取り組みについてお聞かせいただけますか?
AQUADJUSTが掲げているのは,海の新経済圏です。これをWARSsaS(Wireless Aqua Robo System as a Service)と呼び,本当に海洋・海中に適応したものを作ろうとしていて,先ほども述べた光だけでなく,電波や音波も加えて,究極の水中ワイヤレス通信ロボットシステムの実現を目指します。
先ほどトリマティスの新事業としてunderXwater事業を紹介しましたが,こちらは水中LiDARを中心とした機器を開発していくのに対して,AQUADJUSTではそれらを乗せるためのロボットを開発し,通信,モニタリング,データのやり取りから実際の運用やサービスまでのすべてをカバーする事業体を考えています。もちろん,その全てを我々だけでできるとは思っていませんので,協業も必要になるかと思っています。
やはり一番のポイントはロボットです。例えば,現在の水中ロボットは,船の下に入り込むと,GPS信号では拾えなくなってしまいます。一つのアプリケーションとして船底検査が想定できますので,自己位置推定技術の開発は重要となります。
また,現在多くのROVは探査用途を主としているので同じような形をしています。やはり,マルチパーパスよりはシングルパーパスで,目的に応じた開発が必要だろうと思います。我々としても,海中の構造物検査用であったり,養殖用であったりするなど,ある程度用途にフォーカスしたロボットを用意していこうと思っています。
─目的に応じたロボットのコンセプトは出来ているのでしょうか?
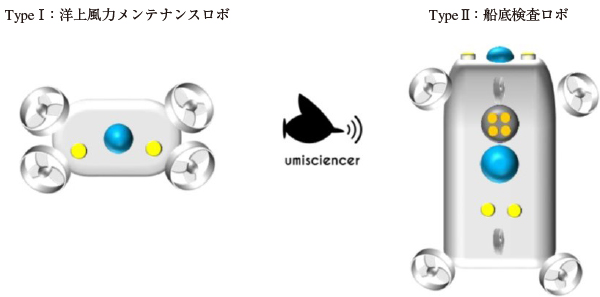
例えば,図に示しているようなもので,洋上風力メンテナンス向けや船底検査向けで形状が異なるものを考えています。共通しているのは8つのスラスターで高度なコントロール制御ができる点ですが,特に重要なのは,センサー技術です。
先ほどの用途に応じたロボットの開発という点では,まず海中構造物検査ですが,ロボットは電磁測位でもって位置を把握し,LiDARや音波を用いて構造物を検査するという構想があります。
もう一つは海中環境計測で,例えば,植生の分布調査や養殖場の管理,水質調査やCO2,マイクロプラスチックといった成分分析が考えられます。前者はトリマティスのフュージョンセンサーが,後者はラマン・蛍光LiDARを用いることが想定されています。
例えば,藻類の生育状態をモニタリングするとした場合,ロボット側にはケーブルがあるとそれが邪魔になってしまいます。ですので,ロボットの操作は無線であることが望ましいです。
また,水中光無線通信スポットの構築も考えられています。ロボットが取得したデータを地上に共有するといったものですが,光と音波を用いることを考えています。例えば,下りの信号は音波を用いて,上りの信号を光伝送にすること,あるいは音波を導波路にして光伝送をするとか色々と考えることができるでしょう。
─AQUADJUSTにおける開発のロードマップをお聞かせいただけますか?
すでに沖縄県などで水中画像データの取得といったモニタリングの実験は進めていますが,通信に関しては,2025年頃からスタートになるかと思います。まずはLiDARを搭載したROVで色々とデータを取っていくところを続けていきたいと考えています。ロボットの開発に関しては2024年末頃から始めて,2025年中のリリースを目指したいと思っています。
実験などについてはALANコンソーシアムのメンバーにも協力していただいているので,引き続き連携していく予定です。ロボット開発には投資も必要ですし,大学との共同開発も視野に動いていきたいと思っています。
─一連の取り組みは,引き続きALANコンソーシアムが核になるということでしょうか?
そうですね。一応,AQUADJUST はALANコンソーシアム発のベンチャーとして位置づけられていますので,一蓮托生で取り組むつもりです。今回のAQUADJUST設立に伴い,私はトリマティスの代表を退任して,こちらの事業に集中をしていきます。もちろん,引き続きトリマティスとの協業も考えています。◇
(月刊OPTRONICS 2024年3月号)