─改めてALANコンソーシアムが目指していることを教えてください
海など水中環境は,地上や空間で使用されている電波を使うことができませんので,現時点での通信手段としては音波などが利用されています。
ALANではこの環境に光技術を持ち込み,光無線通信や光無線給電,LiDARを用いたモニタリングの実現と,それらの社会実装を目指して技術開発に取り組んでいます。
その中で我々は,青色レーザーを搭載した水中LiDARの開発を進めてきました。水中では青色や緑色の波長帯が良く通ることが知られています。我々は2021年度の成果として,JAMSTECと共同で,この時は緑色レーザーを用い,海中での1 Gb/s×100 mの光ワイヤレス通信に成功しました。この成果が非常にインパクトがありまして,「本当にできるんだ」との声もあり,音波で行なっていた人たちも光と一緒にやらないといけないと言い始めました。そこからです,潮目が変わったのは。
─トリマティスにおける技術開発の現状を紹介していただけますか?
トリマティスでは,新しい水中事業に取り組み始めています。我々はunderXwater事業と呼んでいますけど,これは水中の見える化を実現しようというものです。そのための水中LiDARの開発を進めているわけですが,同時に計測実験も行なっています。
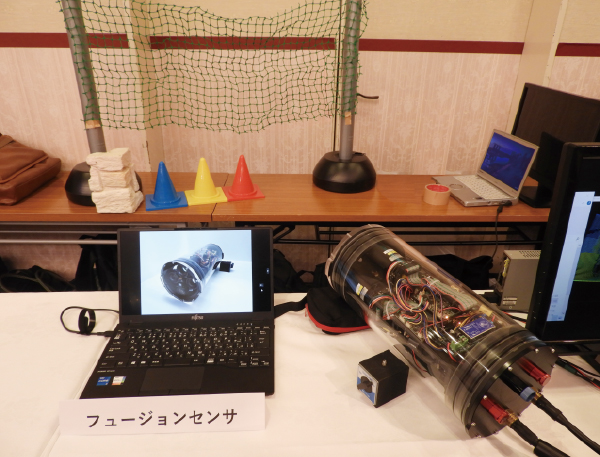
水中LiDARはセンサーが反射光を受光するまでの時間差を利用した測距方法であるToF(Time of Flight)で,2019年より小型化,高精細化,高速化の開発に取り組んできました。2023年にはさらなる小型化を進め,画像取得においてRGBカメラとの融合も図り,計測時間が0.05秒/フレーム,計
測点数が120万点/秒の高速化を達成しています。
これまで行なってきた計測実験では,まず遊泳中のニジマスの三次元計測があります。これは用途として養殖が挙げられますが,現状では個体識別がまだ確立できていませんので,そこが課題となっています。
2023年4月には和歌山県の湯浅湾で水中探査ロボットROVメーカーの広和さんと共同で,我々の水中LiDARをROVに搭載し,実海域での計測実験も行ないました。
実際太陽光のノイズによる迷光であるとか,受光のパワーの問題もあるなど,いくつもの課題が明らかになってきましたが,これらを解決していく開発を進めています。そのうちの一つが,RGBレーザーとカメラとの融合です。
また,千葉大学の椎名(達雄)先生と共同で取り組んでいるのが,ラマンLiDARによる水中のCO2濃度計測です。海面のCO2濃度は衛星から見れるようですが,海中と同じ濃度とは限りません。これをリアルタイムモニタリングで証明していくことができないかと考えています。光で計測ができれば,さらにCO2の回収もできないかと考えていますが,こちらのハードルは高いものの,チャレンジできればと思っています。
このような活動を進めてきましたが,いま会社設立から20年を経て思っているのが,光がキーテクノロジーではあるのだけれど,それだけではダメだということ。音波や電磁波も加えて,さらにカメラも導入してといったミキシングをし,色々とコラボレーションが必要だとの考えに至りました。
その実現においてはロボティクスの開発も重要だろうと考えています。それで,これらを開発,実現していくために,『AQUADJAST(アクアジャスト)』という会社を設立しました。その意味でこの20年というのがまた節目になるかと思っています。