2007年 東京大学大学院情報理工学系研究科システム情報学専攻博士課程修了,博士(情報理工学)
東京大学大学院情報理工学系研究科助教,講師などを経て,2018年より現職
知的情報処理と計測技術を融合する高速実世界センシング,実世界のダイナミックデジタルアーカイブ,超高速プロジェクタの進化と実世界拡張などの研究に従事
日本ロボット学会論文賞,日本VR学会論文賞,画像センシング技術研究会高木賞などを受賞
今やプロジェクションマッピングはイベントに欠かせない技術の一つとなった。巨大な建築物が自在に動き,変化する姿は,理屈は分かっていても不思議な世界に引きずり込まれる楽しさがある。
このプロジェクションマッピングをさらに進化させ,動いている対象に追従して投映する「ダイナミックプロジェクションマッピング」の研究が進んでいる。
我々が普段目にしている「もの」に対し,周囲の環境と矛盾しない映像を映し込んだ時,我々はそれを別の「もの」として認知するのであろうか。
今回はこのダイナミックプロジェクションマッピングで様々な成果を上げる東京工業大学准教授の渡辺義浩氏にインタビューに応じて頂いた。どうしても文字と写真だけでは伝わりきらない部分もあるので,文中にある各リンク先の映像でこの研究の本当の凄さ,面白さを是非ご覧頂きたい。
─先生のご研究について教えてください
私はもともと超高速の画像処理を研究していました。人間は1秒間に30回くらい連続する静止画を提示するとアニメーションに見えるのですが,それのさらに30倍,1秒間に1000回映像を撮って,次の映像が来る前に画像処理を行なう超高速の認識,すべてがスローモーションに見えるようなビジョン技術を研究していました。
その応用として以前,東京大学の石川正俊先生の研究室で開発したのが,本を超高速でスキャンする装置(参考リンク①)で最大1分間に250ページをスキャンできます。スローモーションで見られる目があれば,本をパラパラめくるだけで読めるんじゃないかという発想で,新たなスキャニング技術として社会の役に立つと考えました。人間は全世界の本を読むことはできませんが,全世界の本を所有するという可能性が拓けるわけです。
①http://www.vision.ict.e.titech.ac.jp/projects/BFS-Auto/index-j.html
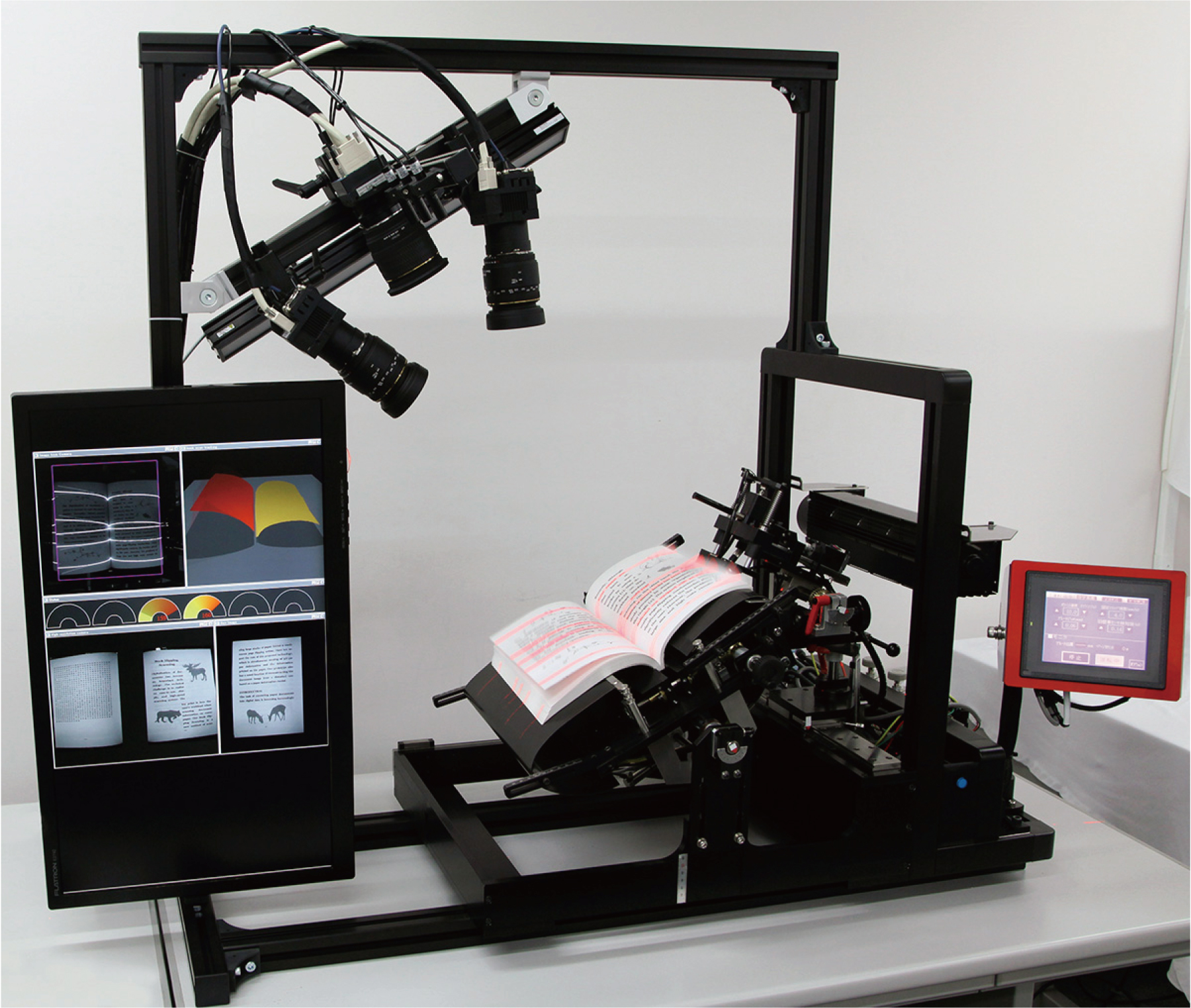
この装置はめくられているページの状態をリアルタイムに画像認識して,高速処理の結果,「今だ」という瞬間をカメラに渡します。これを例えばロボットに渡せば,ロボットを超高速に動かす応用にもなります。
画像処理の結果は基本的に大容量の二次元データですが,例えばロボットの関節の角度や,私の装置の撮影のタイミングでは,かなり圧縮された信号として用いられます。でもせっかくのリッチコンテンツなので,もっとリッチに制御できるデバイスで処理結果を使いたいと考えた時に,プロジェクターが魅力的に映ったわけです。
つまり超高速画像処理技術で1秒間に1000回の結果を出しても人間は反応できませんが,プロジェクターに投映すればサービスになり得ます。
例えば人間は「これは木」「これはプラスチック」と見るだけで認識できますが,これは化学分析をしているわけではなく,反射光を脳が解析して認識した結果です。これでリアルだと感じられるならば,プロジェクターの光をいじってあげれば,いろんな可能性が拓けると思ったのです。