 早稲田大学とサステナジーは,ソーラーパネル下で複数種の植物が混生密生する農地環境において移動および種植え・雑草剪定・収穫の3作業が可能なロボットと,その遠隔作業を実現する新たな操縦システムを開発した(ニュースリリース)。
早稲田大学とサステナジーは,ソーラーパネル下で複数種の植物が混生密生する農地環境において移動および種植え・雑草剪定・収穫の3作業が可能なロボットと,その遠隔作業を実現する新たな操縦システムを開発した(ニュースリリース)。
近年,人類の喫緊の課題として気候変動があり,カーボンニュートラルへの転換が求められている。2019年に政府間組織IPCCがまとめた土地関係特別報告書によると,近年の人為起源の温室効果ガスの排出源割合のうち,農業や林業・畜産業を含めた土地利用による排出量が全体の約30%を占めており,従来の農法の再考の重要性が指摘されている。
ソニーコンピュータサイエンス研究所(ソニーCSL)では,これまで行われていた単一作物を集中して育てる農業に対して,耕起,施肥,農薬散布を行なわず,生物多様性を高度に増進した拡張生態系を構築して食料生産を行う協生農法を提案している。
協生農法では農地に適さない乾燥地帯のような従来の農法が適用できない土地であっても,段階的に生態系を構築し緑化しながら食料生産を行なうことができる。ただし,協生農法を従来の農法が適用できない土地で行なう場合には,協生農法導入初期の未熟な生態系を日光や風雨から保護するため,事前に低木などを植え,半日陰を形成した上での農法開始が必要となる。
サステナジーは,多くの太陽光発電所のソーラーパネル下のスペースが利用されていないことに着目し,ソーラーパネル下にできる半日陰にて,ソニーCSLが提案する協生農法を行なうことができれば,劣化した土壌を回復し,緑化・農地化することで,同じ土地で食料生産と再生可能エネルギーによる電気エネルギー生産を両立できると考えた。
しかし,協生農法では生育時期や生育速度の異なる複数種の植物を同じ土地で混生密生させるため,従来農法に比べ,時期を問わず種植え・雑草剪定・収穫といった複数の作業が必要となる。ところが,既存の農業機械や農業ロボットは従来の農法を対象に開発されており,複数作業を連続的に実行できるロボットはなかった。
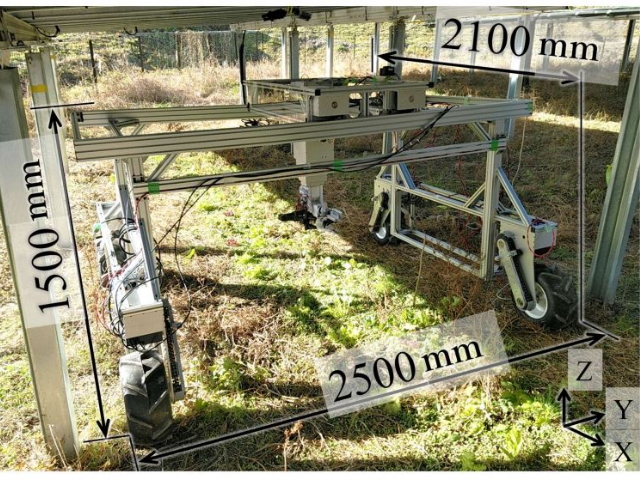
今回研究グループは,ソーラーパネル下で植物が混生密生する農地環境において移動および種植え・雑草剪定・収穫の3作業を実行するロボットと,その遠隔操作が可能な操縦システムを開発。従来比で,動作時間:49%削減,障害物との干渉率:50%削減を達成した。
研究グループは,協生農法を地球規模で推進することで,地球生態系の回復,気候変動防止に寄与する食料生産,カーボンニュートラル社会の実現への貢献が期待されるとしている。