 九州大学の研究グループは,機械学習を活用したノイズフィルターを組み込んだ新しい電子顕微鏡の計測手法を開発し,物体の内部をナノメートルスケールの解像度で立体的に可視化するトモグラフィー技術を従来よりも100倍高速化することに成功した(ニュースリリース)。
九州大学の研究グループは,機械学習を活用したノイズフィルターを組み込んだ新しい電子顕微鏡の計測手法を開発し,物体の内部をナノメートルスケールの解像度で立体的に可視化するトモグラフィー技術を従来よりも100倍高速化することに成功した(ニュースリリース)。
電子顕微鏡の計測手法開発において現在最も注力されている技術の一つに,観察対象が実際に機能する様子をリアルタイムで可視化するオペランド観察があるが,オペランド観察では,観察対象自体とその周囲環境の両方を試料として含むため試料全体が厚くなる。
透過電子顕微鏡法(TEM)では観察視野全体に電子線を一様に照射し,透過電子線に含まれる試料の構造情報がレンズによって拡大され,カメラ等の記録媒体に転送される。一方,走査透過電子顕微鏡法(STEM)では試料上の一点に収束された電子線で試料上を走査することにより撮像される。
視野全体の情報を一度にカメラで記録できるTEMは撮像速度の面でSTEMに対し有利。しかしながら,レンズの色収差の影響を受けるため,TEMでは厚い試料の観察時に像が著しくぼやけるという課題があり,一般に試料の厚みは100nm程度に制限されていた。
撮影に視野全体の走査が必要なSTEMは撮像速度の面でTEMに劣るが,STEMには結像レンズ系の色収差の影響による解像度低下を回避でき,厚い試料の観察に向く。STEMにおける電子線の走査を市販のハードウェアで限界まで速くすると,数10ミリ秒の撮像速度を実現できるが,画像には複雑なノイズ・非線形な画像歪みが含まれる。
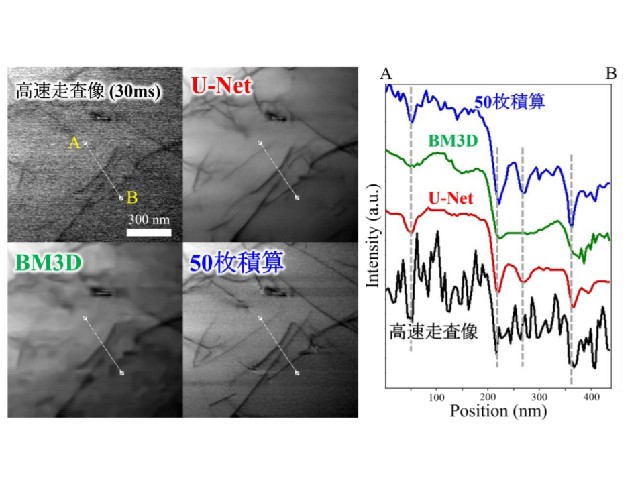
STEM像を同一視野から50枚取得して積算すると,ノイズを低減できるが,画像の取得に合計で数秒の時間を要する。一方,高性能ノイズフィルターを適用することで平滑な画像を得ることもできるが,50枚積算像と比較するとぼやけてしまう。
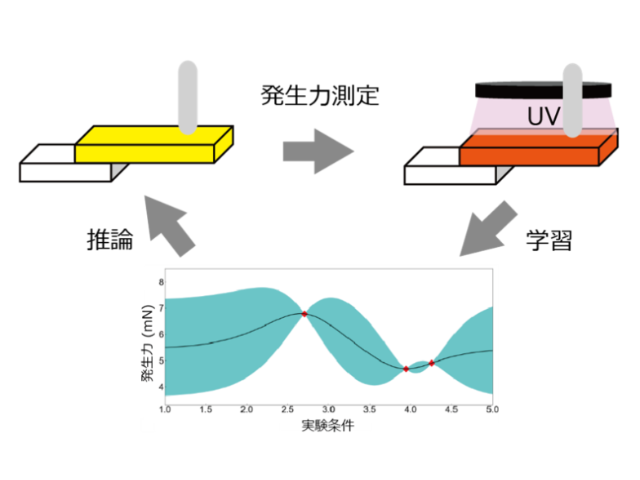
そこで機械学習を活用したノイズフィルターの作製を試みた。機械学習では何層にもフィルターが連なったU-Netと呼ばれるネットワーク型のフィルターを採用し,175種類の視野から得た合計8750枚の画像から構成した教師データを使用した結果,1枚あたり30ミリ秒の高速撮像でも数秒かけて取得したかのような低ノイズ画像が得られるようになった。
従来,立体可視化に不可欠な連続傾斜像の取得にはSTEMでは数10分を要していた。開発した高速STEMにより,連続傾斜像取得時間を5秒まで短縮した。これにより,より厚い試料の内部構造を立体的に高速観察できるようになった。
研究グループは,電子顕微鏡によるオペランド観察の適用範囲の大きな拡大に繋がる成果だとしている。