山梨大学と甲斐けもの社中は,熱赤外線カメラを搭載した小型UAV(ドローン)を用いて,捕獲現場でニホンジカ存在確認から捕獲支援に至るまでの技術実証を行なった(ニュースリリース)。
近年,全国的に野生動物,特にニホンジカによる被害が深刻化している。被害対策のひとつとして捕獲が実施されているが,現行の技術では,高度な経験に基づく狩猟者による存在確認ができなければ捕獲活動が実施不可能なばかりか,存在確認ができていない状況での捕獲では最悪の場合に捕獲の空振りなど非効率な作業となってしまう問題がある。
このような状況のなか,近年,個体数調査においては小型UAVを用いた調査技術に期待が高まるようになった。特に,従来のRGB画像からの色判別のみでは識別困難であったニホンジカの調査において,ドローン搭載の熱赤外センサーを活用して地表面との温度差に着目した試みが開始されつつあるが,実際の猟銃による捕獲現場において捕獲者と連携して実効力のある捕獲活用策の確立にいたっていない。
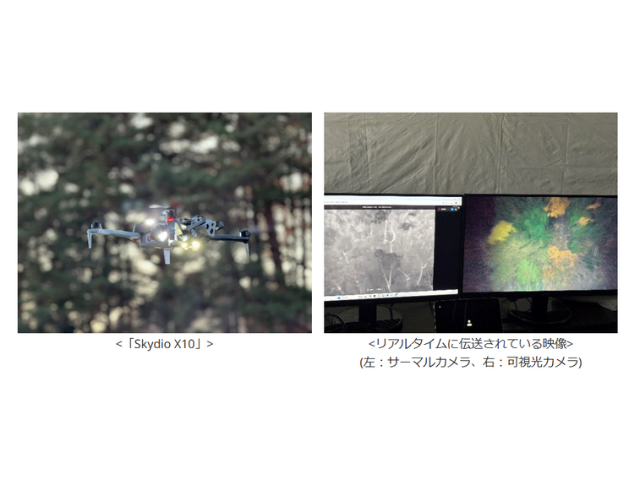
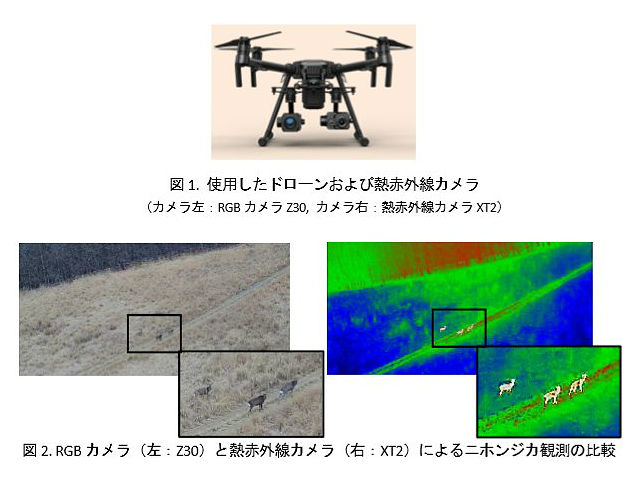
今回研究グループは,2019年4月に,山梨県南アルプス市塩沢地区を対象に,ドローン本体は中国DJI「Matrice200」「同210」,カメラはDJIと米FLIR Systemsが共同開発した「ZenmuseXT2」(熱赤外線カメラ)と「Z30」(RGBカメラ)を用い,ニホンジカ捕獲に着手する一定時間前に調査フライトを行ない,近隣の存在確認を行なった。
今回の手法のポイントは,一般的に熱赤外線カメラの使用は夜間利用を想定することに対し,一日の中で温度が最も低い「日の出前後」にドローン搭載の熱赤外センサーにより観測することで,観測画像からニホンジカと地表面温度の差をもとに短時間で存在を判別したことにある。
得られた存在位置は地図上に示すことで捕獲計画の策定と捕獲者同士の配置の相互確認に利用し,捕獲実行に着手した。捕獲作業中は,ドローン及びGPSで捕獲者と捕獲対象の位置の監視と,捕獲作業者に対して情報伝達することで支援を行なった。
その結果,ニホンジカの存在場所を捕獲活動開始前に把握できるため,現場において効果的な捕獲場所の選定に活用できることに加え,現地で実効力がある追い込み計画と安全な実施計画策定ができ,捕獲作業労力の減少し,捕獲者の安全性が向上したという。
研究グループは今後,この実証研究を継続・発展させることでドローン連携による捕獲作業の事前計画策定と実施における標準化を目指し,さらなる効率化と安全性の向上が期待できるとしている。