ALAN(Aqua Local Area Network:エーラン)コンソーシアムは2月7日,水中光無線技術に関する現状やこれまでの活動実績の報告とともに,新しいプロジェクトについて発表した。
ALAN(Aqua Local Area Network:エーラン)コンソーシアムは2月7日,水中光無線技術に関する現状やこれまでの活動実績の報告とともに,新しいプロジェクトについて発表した。
同コンソーシアムは,電子情報技術産業協会(JEITA)「JEITA共創プログラム」の第一弾として設立されたもので,日本が海中光技術で世界をリードすることを目指し,新たな産業の可能性を探るための,技術リサーチや研究開発を展開するためのもの。
 代表はトリマティス,メンバーには海洋研究開発機構,産業技術総合研究所,情報通信研究機構の国立研究開発法人,千葉工業大,東海大,東京工業大,東北大,名城大,山梨大,早稲田大の大学とKDDI総合研究所が参画。企業は太陽誘電,電気興業,浜松ホトニクス,モバイルテクノが入会している。
代表はトリマティス,メンバーには海洋研究開発機構,産業技術総合研究所,情報通信研究機構の国立研究開発法人,千葉工業大,東海大,東京工業大,東北大,名城大,山梨大,早稲田大の大学とKDDI総合研究所が参画。企業は太陽誘電,電気興業,浜松ホトニクス,モバイルテクノが入会している。
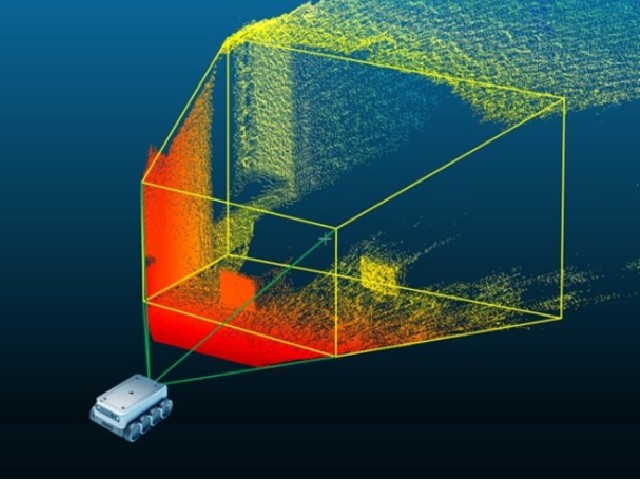
ALANコンソーシアムは技術の議論だけでなく,国家プロジェクトの提案や,コンソーシアムの中の企業で実際に実用化に向けた活動をしていくとしており,その第1段としてトリマティスが「水中LiDARの開発」をスタートさせた。

同社では,「日本国内を見渡したところ,要素技術は揃っているのに,コンセプトがないため,自分たちが先頭に立ってやってみることが必要だと感じた」としており,また,水中に関わる産業は山ほどあるが,「まずは水中を照らし明らかにして詳細データ化しよう」となったという。水槽での実験の限界もあり,ROV(遠隔操作型無人潜水機)に搭載させることで具現化への第一歩とし,実環境での実験を目指すとしている。
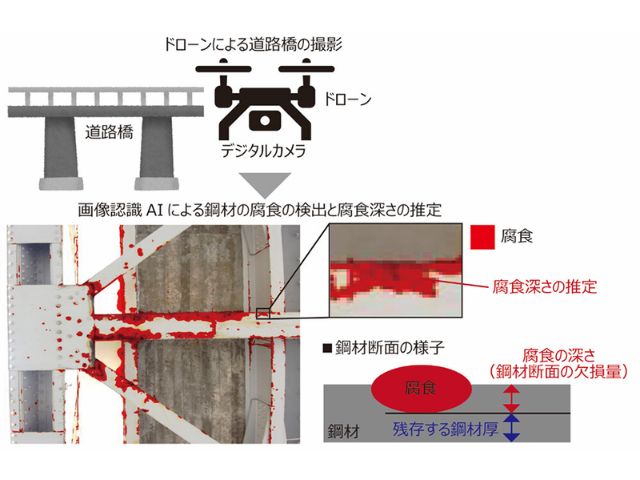
実用化後のビジネスとして考えられるものに,まずは社会インフラの保守がある。日本の社会インフラである道路橋,河川,港湾等は2023年には43%の橋梁が建設50年を迎え,今後,維持管理や修繕に対する費用が増大すると考えられる。特に水中にある橋梁などの検査では,今まではダイバーの目視による検査が主だった。

しかし,ダイバーの人出不足に加え,高精度な点検も必要になれば,LiDARが不可欠になると考えられることから水中構造物検査にも大きな需要があると考えられている。国内の道路橋は約15.7万ヶ所,河川管理施設(水門等)が約1万ヶ所,港湾岸壁が約5,000ヶ所あり,仮に1件当たり100万円の検査費用とすると検査市場の規模は650億円になると推測される。こうした場所では,ROV,AUV(自律型無人潜水機)+LiDARによる検査の方が大幅にコストダウンとなると考えられている。
実際に世界の無人潜水艇の市場規模は伸びており,国土交通省が掲げる「インフラのライフサイクルマネジメント」の流れから潜水士からロボットへと移り始めている。ROV,AUVをみると低価格帯(数十万~百万円程度)と海洋調査用等の高価格帯(数千万後半~1億円規模)のものはあるが,ミドルクラスのROV,AUVがまだなく,ミドルクラスの拡充が水中ビジネスの飛躍につながるとしている。
水産,養殖においても魚数,生育状態,水質の管理に光の技術は使え,2030年頃には漁業と養殖ではその漁獲量,生産量で同量になるとの予測もある。現在,魚のサイズ・個数を計るのにステレオカメラが使われているが,測定した画像を手動で見分け測定するため,一人が数時間つきっきりの作業となる。
しかしLiDARならば手間をかけない方法で,週1程度で魚の平均サイズがアップロードされる機能をつくれると期待される。LiDARの1セット当たりの要求コストが導入時1,000万円程度,普及時で300~500万円と考えており,さらに情報をどれ位の解像度で見たいのか,どれ位の容量,スピードで伝送したいのかなど,ネットワーク,通信技術などから連携させ,アプローチしていく。
同社はAqua-Pulsarシリーズとして,まず水中でも遠くが照らせるよう,散乱してしまう白色ではなく,青/緑/黄色のストロボで照らし出す水中ストロボを開発。LiDARは平成29年度補正ものづくり補助事業で,フラッシュタイプの水中LiDARを開発。昨年11月にかけて「橋脚水中部点検用レーザー距離測定機」の試作開発を実施した。スキャナーが付いてないので距離を測るだけの機能だが,今年の実験ではスキャン機能の付いたものを開発する予定だ。
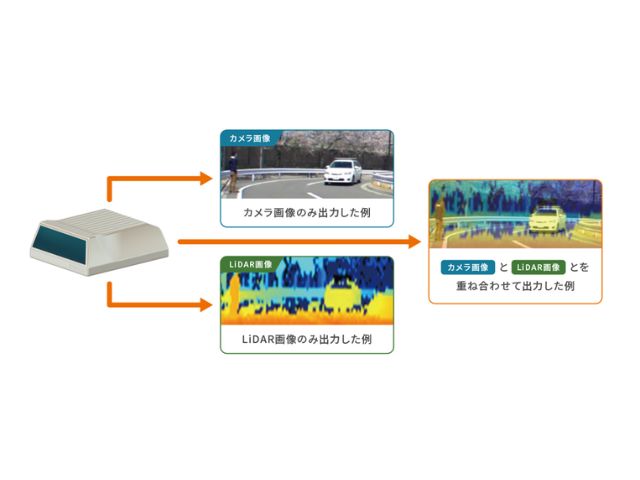
ストロボで照らし,カメラで確認し,LiDARでデータ化する。この3つが揃うことでAUVロボットの目にすることができる。ロボットは見たものを水中光無線通信で伝送,それを複数のネットワークへ橋渡していくというイメージで,映像,画像,データ+ロボティクス+通信でネットワークとつながる。その意味で要求される技術はまだあり,ALANコンソーシアムでは企業の参加を今後も募集していく予定だ。