 東北大学は,「先端融合領域イノベーション創出拠点形成プログラム」の協働企業と共同で,MEMS技術による3軸力センサーと,多数のセンサーを制御できる専用LSI「センサプラットフォームLSI」とをワンチップ化した集積化触覚センサーの開発に成功した(ニュースリリース)。
東北大学は,「先端融合領域イノベーション創出拠点形成プログラム」の協働企業と共同で,MEMS技術による3軸力センサーと,多数のセンサーを制御できる専用LSI「センサプラットフォームLSI」とをワンチップ化した集積化触覚センサーの開発に成功した(ニュースリリース)。
人と協調して作業をする人間型ロボットの力加減を迅速かつ適切に調節するためには,ロボットの手や腕に多数の触覚センサーを配置する必要がある。しかし,これまでは性能と小型化を両立することができず,触覚センサーの利用は限定されていた。
そこで,生物の触覚器官の機能を参考にして,圧力とせん断力の高精度検知,閾値動作(イベントドリブン),順応などの機能を有する集積化触覚センサーを開発し,問題の大部分を解決した。小型化と高密度実装はMEMS技術をベースとしたヘテロ集積化技術によって実現した。この技術は,日常生活を支えるライフサポートロボットへの実装のほか,工場の生産・物流ラインの省人化・効率化にも応用できるとしている。
「センサプラットフォームLSI」は,最大8チャネルの容量センサーもしくは抵抗センサーに接続できる。また,通信速度,センシングの種類,センシングの感度,バス輻輳回避のための仕組みなどを自由に設定できる。この仕組みによって,多種原理のセンサーを多数個,同じバス上に接続できるプラットフォーム「マルチセンサ実装プラットフォーム」を提供している。
さらに,超小型集積化触覚センサーの実現にあたっては,MEMSとLSIとのウエハレベル一体化のためのプラットフォーム「MEMS-LSI集積化プラットフォーム」を開発した。また,このプラットフォームに基づく集積化MEMSを低コストで開発する方法も開発した。
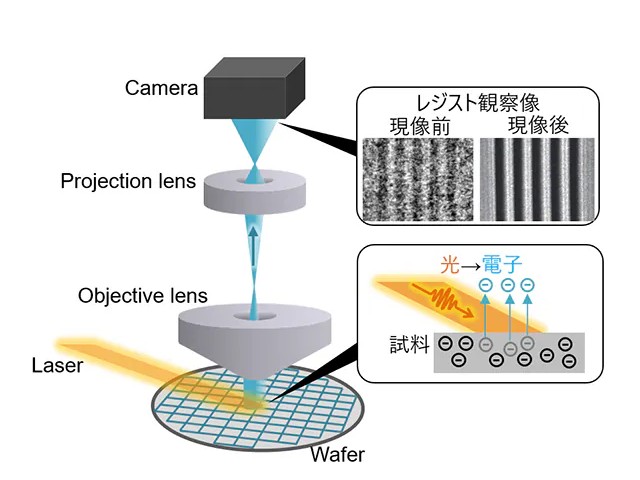
Siファウンダリ(半導体受託開発企業)が提供するウエハ試作サービスには,フルマスク(全買い取り)とマルチプロジェクトウエハ(MPW,相乗り)の2種類があり,研究開発段階ではMPWがコストの面で有利となる。しかし,別の顧客のチップが相乗りされているので,その回路の部分は,秘密保護のためにレーザーによって破壊する処理が行なわれる。
破壊箇所の凹凸は数十µmあり,その後の半導体プロセスを追加で行なうのに適していない。そこで,破壊された箇所の修正処理を行なうことで,TSV(Though Silicon Via:シリコン基板貫通配線)や気密封止構造の作製のための追加のプロセスを可能とした。これによって,MPWを用いても「MEMS-LSI集積化プラットフォーム」を利用できる。
「マルチセンサ実装プラットフォーム」と「MEMS-LSI 集積化プラットフォーム」は,ロボット用触覚センサーに限らず幅広い応用が期待されるため,他の企業や研究機関などにも提供する用意があるとしている。