3. マシュマロゲルを用いた光学式触覚センサーの特徴
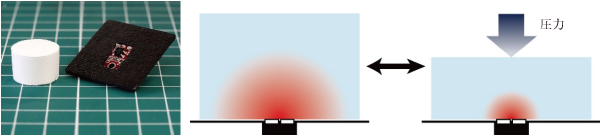
マシュマロゲルを用いた触覚センサーの特徴は,この材料を光学材料兼インターフェイスとして用いる点にある。シリコーンはシリコンフォトダイオードの検出波長である400−1100 nmをほとんど吸収しないため,センサーに用いる光源は範囲内のどの波長を選んでもよい。フォトリフレクタ(近赤外LED+フォトダイオード)や脈波センサー(緑色,赤色,近赤外LED+フォトダイオード)などをそのまま流用できる上,その応答特性は波長によって大きく変わることがない。図2は実際に作製した光学式触覚センサーの構成例である。フォトリフレクタをArduinoやSpresenseなどのマイコンにつなげることで簡単に触覚をモニタリングできる。
マシュマロゲルで触覚センサーを作り始めてから知ったことであるが,発泡プラスチックを用いたセンサーは以前より考案されていた8)。しかし発泡プラスチックを用いる場合の応答原理は異なる。フォトリフレクタを用いた場合,マシュマロゲルを圧縮するとフォトダイオードで検出される光の強度は減少するが,発泡プラスチックでは逆に増加する。これは,発泡体の骨格スケールがゾル−ゲル法により作製される多孔体に比べて大きく,入射光を反射しているためと考えられる。
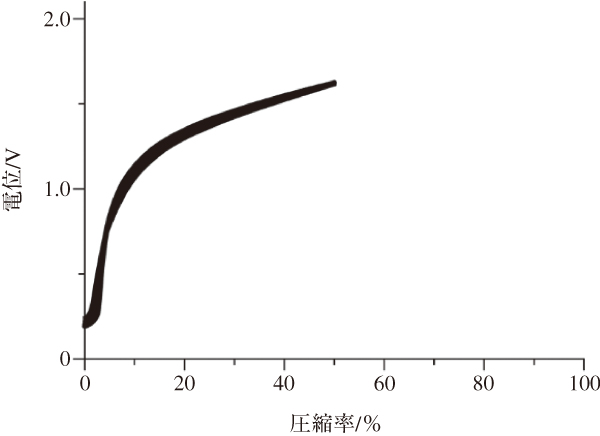
マシュマロゲルを光学部品として利用する特徴として,薄型化が挙げられる。前述の通りマシュマロゲルは光をよく拡散反射する。よほど強い外光に曝されない限り表面カバーなしでも動作に悪影響は出ず,太陽光程度であれば1 mm厚でも問題なく使用可能である。マシュマロゲルを用いた光学式触覚センサーの長所として,変位に対してヒステリシスをほとんど示さない点も考えられる(図3)。ただしその応答性はリニアではないため,例えば精度を必要とする変位センサーなどへの応用は困難である。柔軟性を生かしたロボットグリッパーの把持検知などに用いられることをこれまでに確認している。
4. 今後の課題
マシュマロゲルを用いたセンサーの問題点として,量産性と耐久性が挙げられる。シリコーン原料は必ず金属ケイ素を経て生産されるため,原料費が高いことで知られている。ゾル−ゲル法によるモノリス型多孔体作製はバッチプロセスになる点も問題である。マシュマロゲルはDIYには便利な材料であり再現実験も多く行われているが,産業化の目処は立っていない。またモノリス型多孔体全般にいえることだが,粉落ちが発生しやすい。外光を拾わない材料であっても,結局カバーが必要になると考えられる。これらの問題を解決するため,安価なプラスチック組成を用いた多孔体の利用を考えている。ポリメタクリル酸メチルなど既報のモノリス型多孔体9)もセンサーに用いることはできるが,より柔軟性や耐久性に優れた新しい材料を開発していく必要がある。
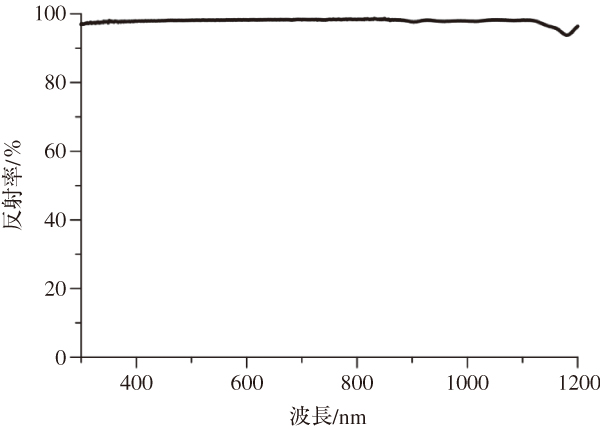
センサー応用から少し離れて,マシュマロゲルによる拡散反射にも触れておく。数mm厚のマシュマロゲルは波長400−1100 nmの光を97.5%以上反射する高い拡散反射性を示す(図4)10)。表面は超撥水性をもつため水でゴミを洗い流しやすく,汚れが入り込んでも表面を少し削るだけで反射率が復活するという便利な性質ももつ。この性質を利用して,マシュマロゲルをリモートセンシングにおける校正用の標準反射として用いることを検討している。
モノリス型多孔体の応用を探る際,他の物性に比べて光学特性はあまり検討されてこなかった。たいていはコーティングなどで目的が果たせるため,バルク体として扱うメリットに乏しかったからである。より優れた光学特性をもつ加工性のいいモノリス型多孔体の開発により,センサー以外への光学応用にもつながっていくだろう。