中央大学とパナソニックコネクトは,つかんだものを落とさずに回し続けられるロボットハンド制御技術を開発した(ニュースリリース)。
近年,ロボットハンドによる高度な動作の一つとしてインハンドマニピュレーションが注目されている。
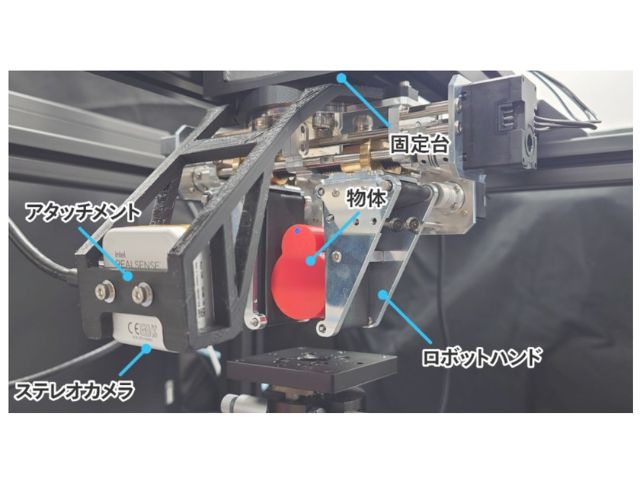
これは,ロボットハンドで把持した対象物の位置や姿勢をハンド内で変更する動作で,これをスムーズに行なうために,表面にコンベアベルトを巻いた複数のフィンガで構成されるロボットハンドが多く研究されている。
フィンガ同士で対象物を把持し,その状態でベルトを動かすことで,対象物の並進と回転が可能となるが,特に姿勢変更のために対象物をハンド内で回転させる際,対象物の形状や姿勢によっては落下させてしまう課題があった。
対象物を把持するためには,対象物の形状や回転中の姿勢に合わせてフィンガ同士の幅を調節する必要があるが,フィンガが必要な幅の分だけ開閉しないことがある。研究ではこの状況を引き起こす2つの原因にアプローチした。
1つ目の原因として,対象物の形状や姿勢によっては,回転中に,対象物とハンドとが接触している部位が変化する「接触点の切り替わり」が起こることがある。
接触点が切り替わる前後では,必要なフィンガ幅が急激に変わりやすくなり,フィンガの制御が追い付かずに対象物を落下させることがある。
一方で,対象物の回転速度が遅い場合には,接触点が切り替わる前後であっても,この変化は小さい。そこで,カメラ画像を基に,接触点がいつ切り替わるのかを予測し,その前後において対象物の回転速度が最も遅くなるようにベルトを制御し,幅変化を抑えた。
また,電子機器の制御には,センサによる観測値から次の時刻における制御値を決定するフィードバック制御が広く採用されているが,現在観測している幅の分だけフィンガを開閉させても,次に必要な幅とは差が生じて対象物を落下させることが予想される。
そこで,次の時刻における対象物の位置や姿勢を予測し,必要となる幅の分だけフィンガを制御することで遅延の影響を低減させた。
今回,「対象物の形状や姿勢」を画像から検出する手法を中央大学,「それに応じてフィンガとベルトを制御するシステム」をパナソニックコネクトが開発した。
これにより,22点の対象物に対して実施した実験では,10点を1回転させることに成功した。また,この手法を使用しない条件に対し,大きい対象物を落下させる割合が14.5%改善し,小さい対象物を1回転させる割合が6.4%向上した。
研究グループはこの技術により,インハンドマニピュレーションを実行できる対象物の種類および位置や姿勢の変更範囲の拡大に繋がるとしている。