 北陸先端科学技術大学院大学(JAIST)の研究グループは,視覚による触覚・近接検知装置を備えたロボットアームの開発に成功した(ニュースリリース)。
北陸先端科学技術大学院大学(JAIST)の研究グループは,視覚による触覚・近接検知装置を備えたロボットアームの開発に成功した(ニュースリリース)。
現在ロボット技術に人間との調和,つまりロボットが人間と共存し,さらに人間とコラボレーションすることが強く求められている。例えば,アームで人間を支える介護ロボットでは,介護サービスの提供を受ける人間が安心感を得られる触覚センシングの活用が検討されているが,ロボットの触覚技術は,視覚技術の研究と比較すると未だ応用例は極めて少ない。
また,同時に周囲の人間や環境に対する安全性を確保するためには,ロボットが周辺状況を高い精度で検知する必要があるが,特に外付けのカメラを利用する場合に,アームや利用者によって遮蔽される領域が多く,アームの近接領域の検出が困難となっている。
研究では,低コストかつシンプルな構造を有する柔軟な触覚装置と,人間との接触を即時に検知することで,人間の行動を推定しながら人間と調和するロボットを実現した。このロボットは,人間の皮膚を模した柔軟なスキン上の複数の接触点へ加えられた力を,ロボットアームの両端に設置されたカメラが,スキンの変形の状態をリアルタイムで測定する。
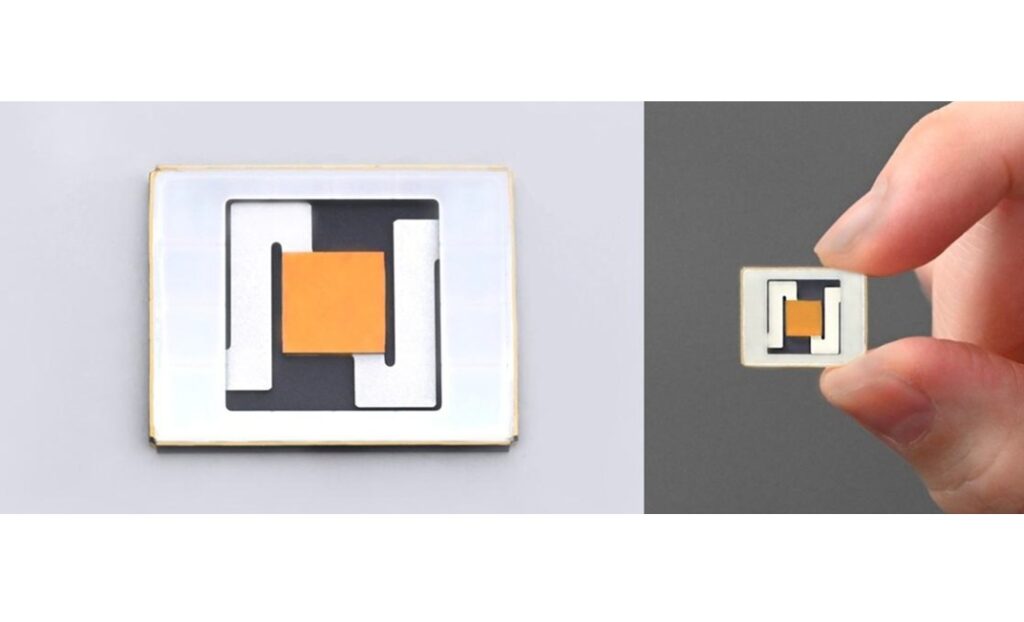
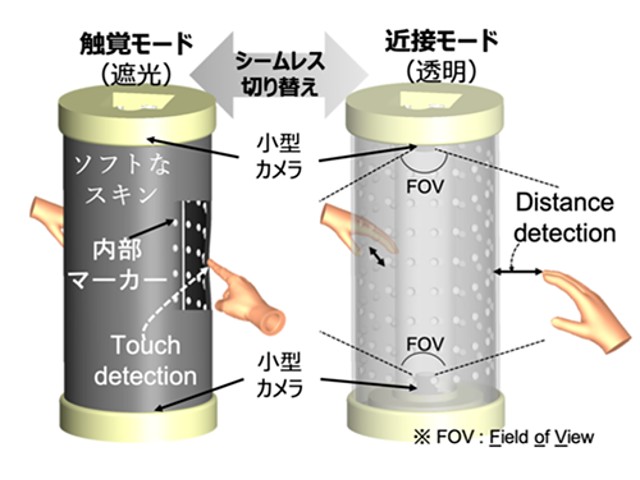
さらに,透明なシリコンゴムと薄い柔軟な高分子分散液晶(PDLC)フィルムを組み合わせることで,柔軟なスキンの透明性をアクティブに切り替えることが可能となった。PDLCフィルムは,外部から小さな電圧を印加することにより,透明/不透明を切り替えることができる。この透明/不透明の切り替えでは,近接覚と触覚の二つのモードを備え,またそのモードをシームレスに切り替えることができる。
ロボットアームは,柔軟なスキンの内側に格子状のマーカーを備え,スキン内部に2台の小型カメラを配置している。スキンの透明性の能動的な切替えにより,近接覚と広範囲の触覚をセンシングする。
圧力センサを用いずカメラによるマーカーの変位から外力を算出することから,配線の複雑さやオクルージョン(光学遮蔽)などをほぼ完全に無くすことに成功しており、高いセンシング精度と耐久性を実現した。
さらに,各モジュールの内圧を変えることでスキンの柔らかさを調整し,スキンに触れた人間に対する触感についても制御できる。研究グループは,深層学習を通じて多様な近接・接触動作・状況を予め学習させることで,人間と調和し,人間との複雑な近接・接触を実現する潜在的に高い適応性を持つとしている。