 ソフトバンク(SB)と東京海洋大学は,北海道厚岸翔洋高等学校の協力を得て,可視光無線通信技術によって,水中の狭隘空間を移動する水中ロボットをリアルタイムで遠隔制御する実証実験に成功した(ニュースリリース)。
ソフトバンク(SB)と東京海洋大学は,北海道厚岸翔洋高等学校の協力を得て,可視光無線通信技術によって,水中の狭隘空間を移動する水中ロボットをリアルタイムで遠隔制御する実証実験に成功した(ニュースリリース)。
電波が著しく減衰する水中での通信には音響通信が用いられてきた。しかし,伝搬速度は1秒間に1,500m 程度と遅く,伝送できる情報量も数十~数百kb/s程度で,精密な測位やリアルタイム性,セキュリティーなどの課題があるほか,使用できる海域や水深,周波数に制約がある。
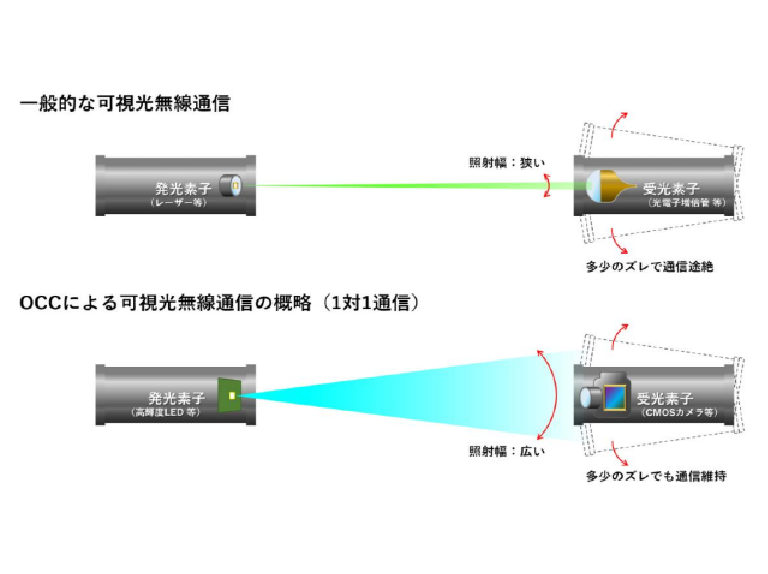
そのため,可視光を使用した無線通信技術の活用が研究されてきたが,光無線通信は双方の光が見えていることが求められ,通信距離も約100m 程度が限界で,高速通信を実現するには照射角が狭い高出力のレーザー光を活用して光軸を合わせ続ける必要があり,移動体などとの通信には高精度な光トラッキング技術が必須となる。
今回開発した遠隔制御技術は,約930kmの遠隔地に展開する無人ロボットに対してアラブThurayaの通信衛星を利用した無線通信を経由して制御命令を送信し,光の明滅を信号に変換するOCC(Optical Camera Communication)の信号に変換して他の無人ロボットなどの制御や観測データの取得を実現するもの。
この技術を活用して,地上の電波が届かない厚岸湖の水面に分厚い氷が張った水中の狭隘空間で,2台の水中ロボットを遠隔地から自在に制御する実験を実施した。
制御命令は衛星携帯により音声で伝送されると,厚岸湖上の指令システムに入力されて,OCCの発光信号として親機から子機に伝送される。子機側ではOCCの信号を受信して機体を動作させる。動作が完了すると,子機から親機に向けて動作完了の信号をOCCで伝送し,信号を受けた親機は衛星携帯を介して,遠隔地の操縦者に状況を知らせる。
実験では子機に搭載された水温計や深度計のデータについても,制御信号と同様にOCCおよび衛星携帯を使って遠隔地の操縦者に伝送することができた。さらに,音声通信だけでなくデータ通信による制御にも対応しており,地域や海域のサービスの状況に応じて最適な通信を組み合わせることで,水中機器との安定した通信を実現できることを実証した。
この結果から,アクセスが困難な地域や海域においても水中ロボットや機器のリアルタイムでの遠隔操作が可能になるとともに,データの収集や観測,機器の監視や保守のための現地調査の低減などの効果が期待できる。また,OCCの活用により海氷や湖氷の下などにおける漁業や調査での活用も見込まれるとしている。