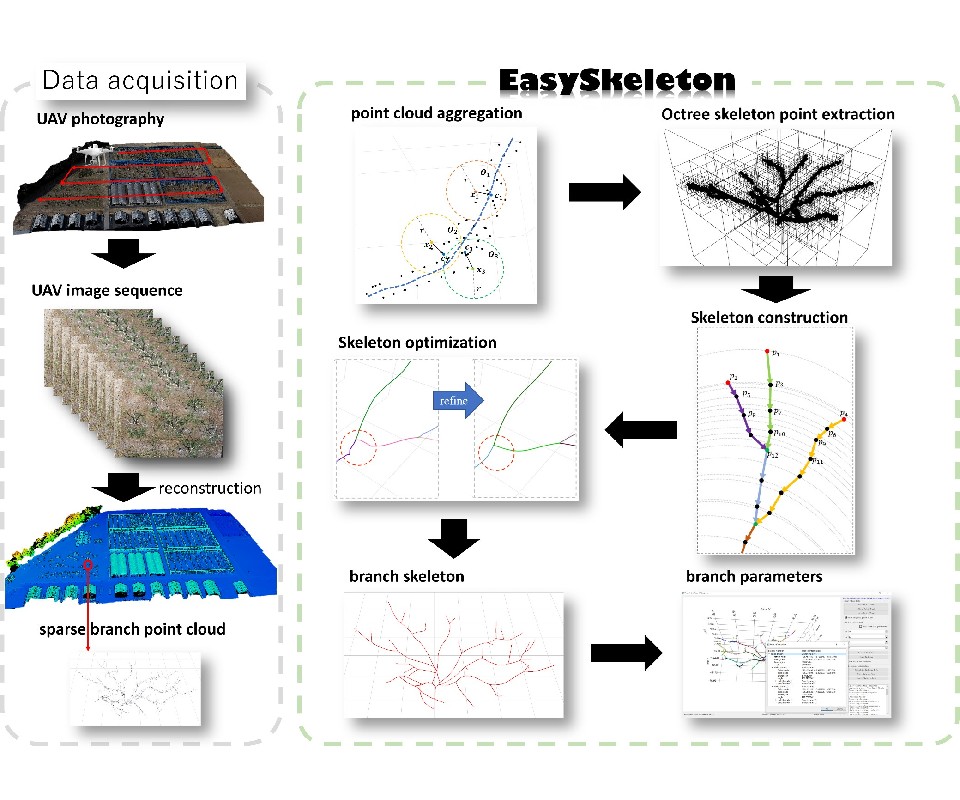
 東京大学の研究グループは,市販されているRGBカメラ付のドローンによる撮影・測量した果樹園の三次元情報を元に,比較的密度の粗い点群からでも樹木の枝構造を解析できる手法を提案した(ニュースリリース)。
東京大学の研究グループは,市販されているRGBカメラ付のドローンによる撮影・測量した果樹園の三次元情報を元に,比較的密度の粗い点群からでも樹木の枝構造を解析できる手法を提案した(ニュースリリース)。
果樹園の科学的管理では,果樹の枝の形態がキャノピーの通気性や光透過性,養分の分布に直接影響し,果実の収量や品質に大きな影響を与える。果樹農業の自動化が進むと,果樹の枝の形態を表現する必要性が出てくる。
点群は一般的に物体の3次元構造を表現するために用いられ,工学的な計測やデジタルモデリングに重要なだけでなく,果樹の点群の3次元スケルトンを取得し,そこから樹高,枝長,枝角などの情報を抽出し,果樹の成長状態解析や枝打ち,枝打ちの支援に利用することが可能。
しかし,現在の高品質な点群データは通常LIDARスキャンで取得されており,コストが高く,果樹園などでの大規模なアプリケーションには適していない。近年のドローン撮影による測量技術の発展に伴い,RGBカメラを搭載したUAVによる点群取得が広く行なわれるようになった。しかし,この方法で収集した点群は空間的にまばらで不規則に分布する場合もあり,既存の骨格抽出アルゴリズムではうまく対応できない。
そのため,大規模な果樹園の精緻な管理を進める上では,疎なRGB点群データから,枝のスケルトン抽出アルゴリズムを行なうことや,使いやすく低コスト化も視野に納めたツールの開発が極めて重要となる。
研究では,ドローン撮影により収集された疎な樹木の枝のRGB点群データに対して,モモ,カキ,クリ,ウメなど一般的な果樹の枝骨格の抽出に成功した。これら果樹の枝の点群に対する評価指標FBP,FEP,HDを開発し,インターフェース付きソフトウェアパッケージに統合した。提案アルゴリズムは,従来のアルゴリズムよりも良好な結果を得ることができた。
研究の結果,ドローン写真測量法を用いて果樹の枝の形態情報を解析することで,LIDARなどを用いたデータ収集にかかるコストを削減できることが可能となるという。
研究グループは,この方法は果樹園などの広い園地での樹木の枝の骨格抽出作業に適しており,さまざまな種類の果樹の成長状態の分析に役立つため,果樹園の科学的管理に一定の実用的価値を持ち,果樹産業へのスマート農業普及への貢献,大規模な果樹園管理を効率的に行なう事が可能になるとしている。