 岡山大学と同大発ベンチャーのビジュアルサーボは,ステレオビジョンを用いた空間計測について研究を行ない,任意対象物の3次元位置姿勢を計測するコンピュータビジョン構築に成功した(ニュースリリース)。
岡山大学と同大発ベンチャーのビジュアルサーボは,ステレオビジョンを用いた空間計測について研究を行ない,任意対象物の3次元位置姿勢を計測するコンピュータビジョン構築に成功した(ニュースリリース)。
観賞魚や食用のサケマスの養殖では魚の非接触寸法計測へのニーズがあり,魚の給餌・育成管理が可能となることから自動養殖技術につながるという。そこで研究では,メダカの自動寸法計測にチャレンジした。
メダカは種類により,金,銀,ラメと多彩で形状も異なる。この多様性がコンピュータによるメダカの寸法計測を困難にしている。そこで研究グループは,対象魚の写真を計測モデルとすることで,対象とするメダカのコンピュータへの指示を容易にした。
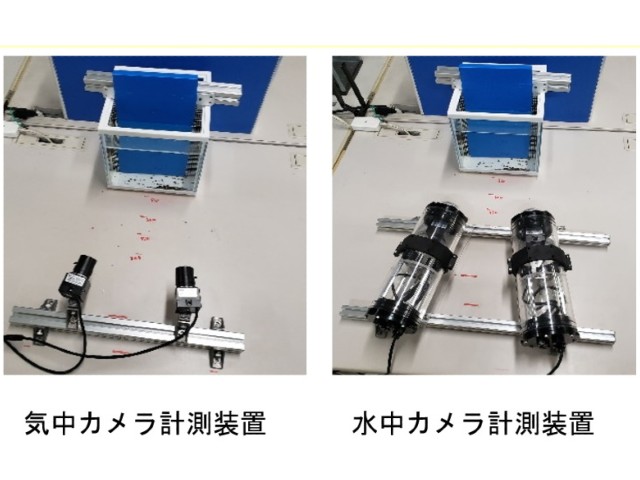
また,写真で指示することは,成長とともに変化する魚の色・模様などの特徴の変化にも影響されない計測を可能とするという。水槽の側面から気中カメラで覗き込んで計測する方法と,飼育水槽内に設置した水中カメラで計測する方法があり,選択が可能。魚を飼育状態で計測できるため,魚に優しい計測方法だとする。
メダカの体長は30mm程度で,同サイズのルアーでは標準偏差,平均誤差はいずれも1mm以下で計測可能。泳ぐ魚の3次元位置姿勢の計測が可能なため,カメラー魚間の距離が算出でき,魚の寸法を正確に計測できる。
空間計測センサーとして市販されている手法は赤外線を用いており,赤外線は水中で減衰が大きく距離を測定できない。また,太陽光に含まれる赤外線が外乱として働くため太陽光下の屋外でも使用できないが,この手法は可視光のみを用いているため,水中・屋外,屋内でも使用が可能だとしている。