 日立Astemoは,高精度で高分解能な全周囲センシングシステムとして,「マルチカメラ3Dセンシングによる360度ステレオビジョン」のプロトタイプを開発したことを発表した(ニュースリリース)。
日立Astemoは,高精度で高分解能な全周囲センシングシステムとして,「マルチカメラ3Dセンシングによる360度ステレオビジョン」のプロトタイプを開発したことを発表した(ニュースリリース)。
現在の自動運転システムの多くは,利用範囲が高速道路走行に限定されているが,自動運転システムを一般道路でも利用できるようにするためには,歩行者や自転車をはじめ,認識を要する対象が複雑に混在するような一般道路における特有な状況において,車両全周囲の道路環境を高精度に認識することが必要となる。
しかし,測距精度が高いレーダーやLiDARのシステムでは,その普及においてコスト上の課題が残存しており,またコスト面で優位性のある全周囲カメラシステムも,主には単眼カメラをベースとした測距方法のため,精度上の課題があったとしている。
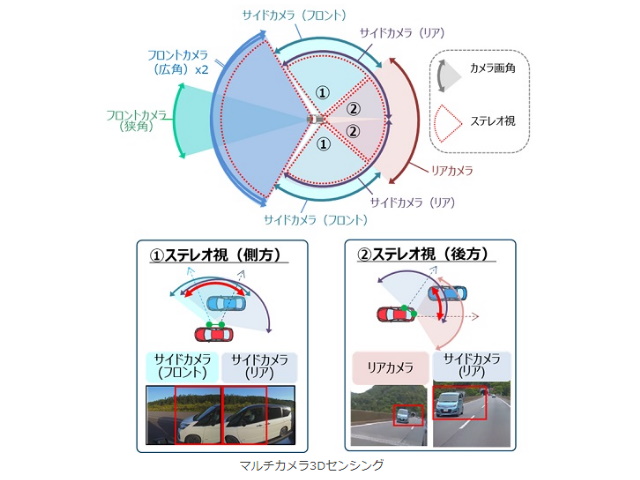
このシステムでは,同社が得意とするステレオカメラ技術の測距機能を活用しつつ,日立製作所との共同開発を通じてカメラ配置に自由度を持たせた。従来形態の同画角でほぼ平行する2個のカメラが一体化されたモジュールとしてではなく,異画角,非平行なカメラの組み合わせでステレオ視ができる10個前後の複数カメラを用い,3次元立体視をする。
このマルチカメラ3Dセンシングを1つの車載カメラシステムとして統合させることで,コスト優位性と高精度・高分解能を両立させた全周囲センシングシステムの360度ステレオビジョンとして具現化したとしている。
ステレオ視による高精度な距離情報を全周囲で生成することで,自車の隣接車線を走行する併走車両や,渋滞時に後方の車列をすり抜けてくる二輪車の距離をとらえて,相対速度と移動方向を推定し,衝突や交差点での巻き込みを回避させる車両制御への応用が可能になる。
また認識機能では,車,二輪車,歩行者,車線といった基本的な物体認識に加えて,他車両の行動を予測するためのウィンカー,赤色灯,ブレーキランプ,さらには信号機,道路標識,路端,走行可能なフリースペース領域といった一般道で必要となる認識対象を網羅しているという。
加えて,カメラセンシングにおける高信頼化と耐環境性向上のための機能も開発。例えば,レンズ表面に付着する水滴や汚れ,降雪時などレンズ全体が遮蔽されてしまう状態などを想定し,それらによる不調パターンをAI学習させ,各カメラに発生した不調要因を識別することで,誤作動を事前に抑制できるようにしたとしている。