 ソシオネクストと東北大学は,自律制御を行なう装置に必須のSLAM(Simultaneous Localization and Mapping,自己位置推定と環境地図作成)処理に必要な時間を,従来技術の約1/60にまで削減できる新しい手法を開発した(ニュースリリース)。
ソシオネクストと東北大学は,自律制御を行なう装置に必須のSLAM(Simultaneous Localization and Mapping,自己位置推定と環境地図作成)処理に必要な時間を,従来技術の約1/60にまで削減できる新しい手法を開発した(ニュースリリース)。
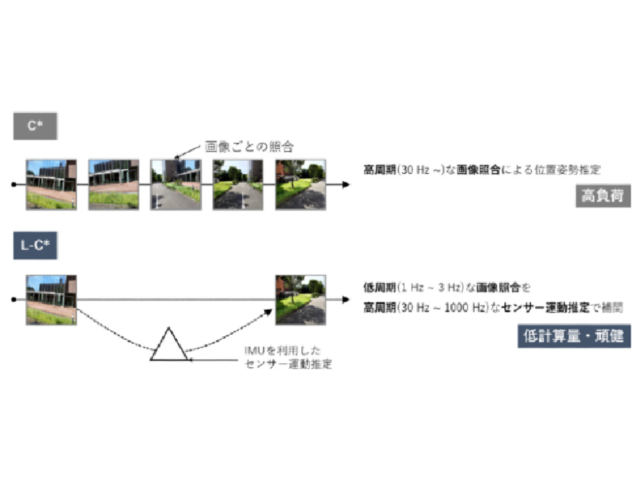
SLAMは周囲の三次元情報を取得するセンシングの違いでLiDARを用いる方法とカメラ映像を用いるVisual SLAMに大別される。
このうちVisual SLAMはカメラ自体が比較的安価であること,自己位置推定に加えて画像認識による制御との組み合わせによる様々なアプリケーションの拡大が期待できることから大きく飛躍している。
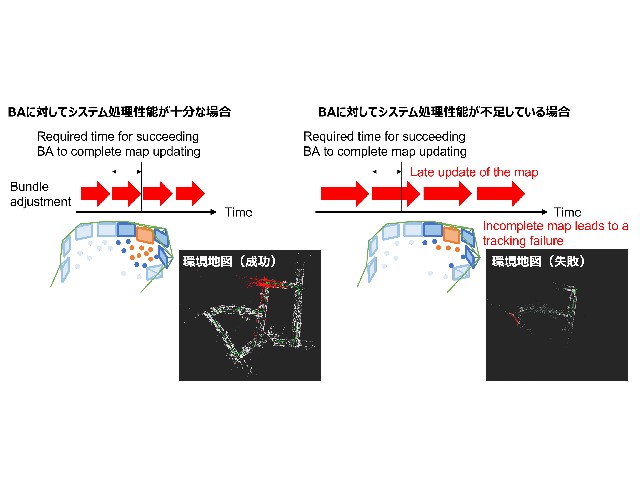
また,深層学習の導入により画像認識技術が近年著しく発展しており,Visual SLAMの進化にも深層学習の活用が重要な要素となっているが,従来提案されてきた手法では,特徴点やカメラ姿勢に基づいてランドマークの未知の三次元情報を最適化するバンドル調整(bundle adjustment:BA)に必要となる膨大な計算に起因する処理量がボトルネックとなり,CPU の処理能力に制約のあるエッジ向け半導体デバイスでの実用的な処理は困難だという課題があった。
今回の研究ではこれを解決する方法として,グラフニューラルネットワークの一種である「Graph Network(GN)」を用いた推論による近似計算手法を提案した。この手法は,GNブロックによるキーフレームとランドマーク情報入力からの更新情報の推論,および多段のGN構造による最終的な値への収束からなり,これらにより従来のLevenberg-Marquardt法を用いた一般的なバンドル調整に対して計算量を抑えた推論処理が可能になったという。
この推論手法を用いてVisual SLAMのバンドル調整を実装し,従来手法として広く使われている「g2o」との比較を行なった。PCによるシミュレーションで処理時間を計測した結果,g2oに対してこの手法は処理時間を1/60まで削減できることを確認した。
ソシオネクストは,今回の研究成果を始めとするVisual SLAM技術の蓄積を同社カスタムSoCソリューション向けの要素技術として確立し,産業機器やモビリティなど,画像認識を必要とする分野で顧客システムの性能向上を提案していく。
さらに,新しい推論手法による処理効率の向上について,画像認識以外の新しい顧客アプリケーションへの応用も検討していくとしている。