 ソニーは,業界初となるSPAD(Single Photon Avalanche Diode)画素を用いた車載LiDAR向け積層型直接Time of Flight(dToF)方式の測距センサーを開発した(ニュースリリース)。
ソニーは,業界初となるSPAD(Single Photon Avalanche Diode)画素を用いた車載LiDAR向け積層型直接Time of Flight(dToF)方式の測距センサーを開発した(ニュースリリース)。
SPADとは,入射した1つの光子(フォトン)から,雪崩のように電子を増幅させる「アバランシェ増倍」を利用する画素構造で,弱い光でも検出することができる。光源から発し対象物で反射した光が,センサーに届くまでの光の飛行時間(時間差)を検出し,対象物までの距離を測定するdToF方式の受光素子として用いることで,長距離かつ高精度な距離測定ができる。
dToF方式を用いた測距センサーでは,単一光子の検出を行なうSPAD画素が用いられる。SPAD画素内の電極にブレークダウン電圧(VBD)を印加し,その電圧を超える過剰エクセスバイアス電圧(VEX)に設定した状態で光子を入射させることで,光電変換により発生した電子がアバランシェ増倍によって増幅する。
電極間の電圧がブレークダウン電圧まで低くなると,アバランシェ増倍は停止する。アバランシェ増倍により発生した電子が放電され,ブレークダウン電圧まで戻った後(クエンチング動作),再び電極間の電圧を過剰エクセスバイアス電圧に設定すると,光子が検出できる状態に戻る(リチャージ動作)。このように,光子の到来時刻を開始点とする電子の増倍動作は,ガイガーモードと呼ばれる。
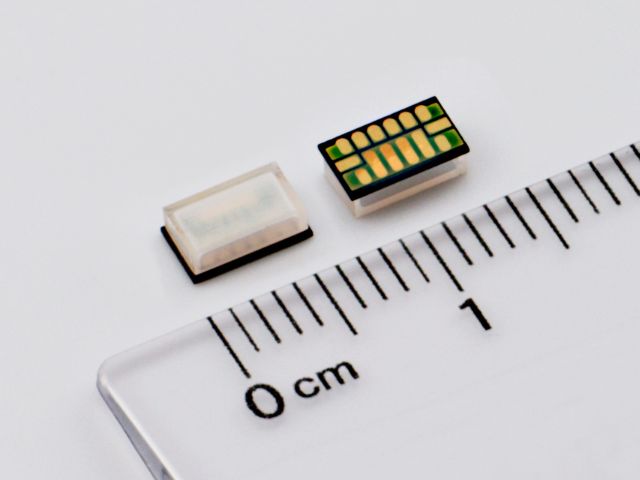
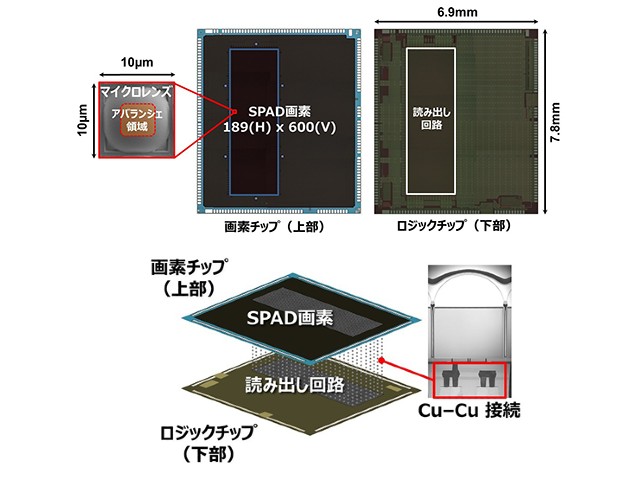
裏面照射型のSPAD画素構造を用いた画素チップと,測距処理回路などを搭載したロジックチップを,Cu-Cu(カッパー・カッパー)接続を用いて一画素ごとに導通した。これにより,光を取り込む画素以外の回路部を下部に配置することで,開口率を高め,22%の高い光子検出効率を実現(905nm)したのに加え,チップサイズは小型ながら,10μm画素サイズで有効画素数約11万(189画素×600画素)の高解像度化を図ったことで,最大300mの距離を,15cm間隔で高精度に測距することが可能になった。
検出した光子の飛行時間をデジタル値に変換するTime to Digital Converter(TDC)とパッシブ型クエンチング/リチャージ回路を独自に開発し,画素ごとにCu-Cu接続することにより,一光子あたりの応答速度を通常時6ナノ秒に高めることが可能となる。さらに,独自のSPAD画素構造により,-40℃から125℃の厳しい条件下においても,安定的な光子検出効率および応答速度を実現した。
同社は,この開発品を搭載したMEMS方式のLiDARも評価用として開発し,顧客やパートナーに向けて提供を開始しているという。