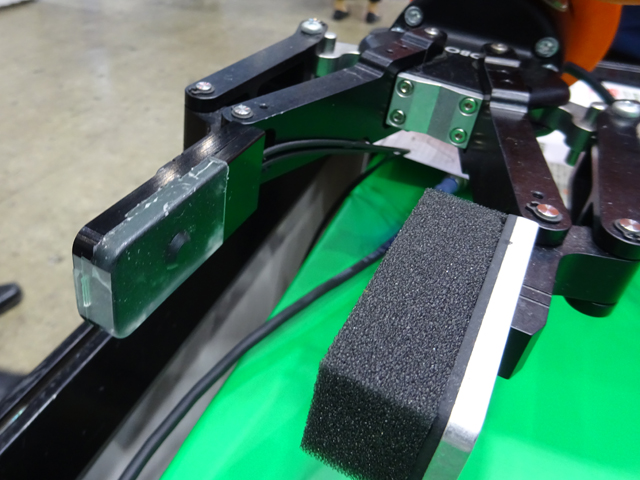
三井化学は関西大学田實研究室と共同で,ロボットハンドのグリップ部に取り付けて,光学的に把持力(圧力)を計測する「光弾性圧力センサー」の開発を進めている。
ロボットハンドに多種多様な物を把持させるためには,対象物の固さを検出して適切なトルクを加えるための圧力センサーが必要になる。これを実現させるためにはマイクロカンチレバーを用いたMEMSセンサーや,静電容量センサーなどが使用されているが,電気的ノイズや大きな負荷に対する機械的強度の問題があった。
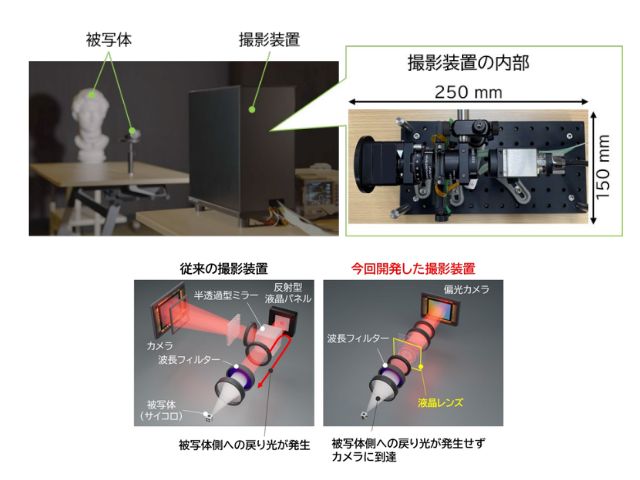
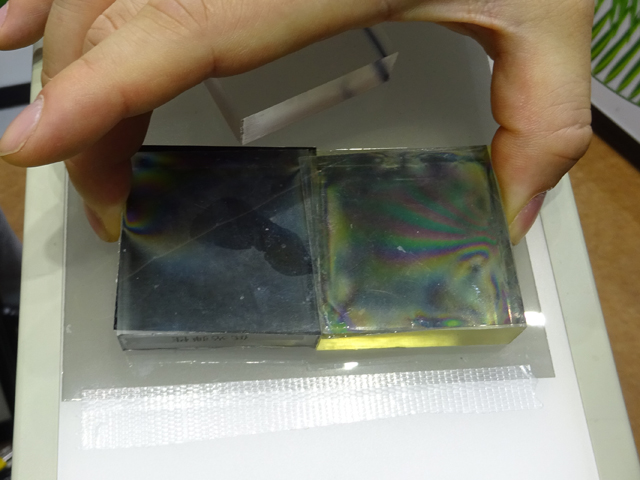
開発するセンサーは,原理的には圧力(張力,加重)によって生じる弾性体内部の応力により生じる複屈折を利用する。偏光板にこうした複屈折を生ずる光弾性を持った樹脂を挟み込み,樹脂の変形量によって漏れ出てくる干渉縞の変化(位相差)を検出して圧力を検出する。
位相差の変化は樹脂の持つ光弾性定数に依存するが,一般的なポリカーボネートの光弾性定数(×10-12Pa-1)が77,PMMAが6,ポリスチレンが10であるところ,三井化学の開発した「光弾性ポリウレタン」は800~13,000と高い値を持つので精密な計測ができ,さらにロボットハンドに必要な柔軟性も持ち合わせている。
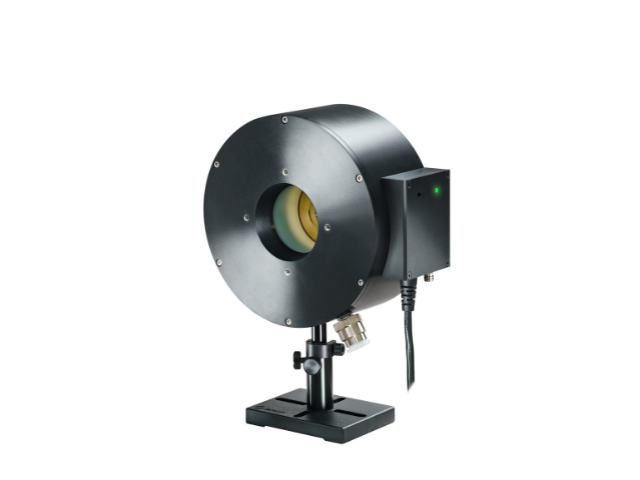
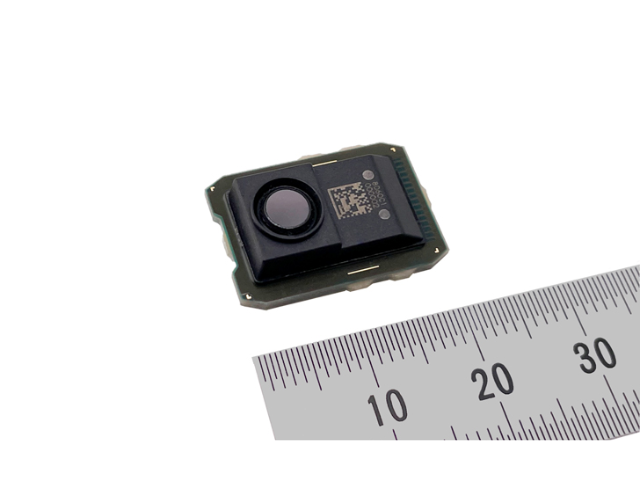
試作したセンサーは根元側にLED光源(波長630nm)と受光部を持ち,光は円偏光版を通って光弾性樹脂を通り,先端側の反射板で反射し,再び円偏光板を通って受光部に入る。検出部の大きさは10mm×30mm,耐荷重は<50N,応答周波数は~100Hz,感度<1g,使用可能温度は-25℃~100℃と,低温で使用できるのも特長だ。
現在,ロボットに実装して,対象物の固さによって仕分けをするデモを行なえるようになっているが,課題として感度はMEMSセンサーの方が上であること,またヒステリシスや圧縮時の干渉縞の変化が線形でないことによる計測誤差があるという。そのため,使用環境によって既存のセンサーとすみ分けるような使い方も想定される。