2015年に政府が示した「ロボット新戦略」(日本経済再生本部)に基づき,新エネルギー・産業技術総合開発機構(NEDO)は「次世代人工知能・ロボット中核技術開発」プロジェクトを開始している。プロジェクトではトップレベルの技術やディファクト化を目指すだけではなく,プラットフォームの構築やコンソーシアムの設立,ベンチャー支援など,技術を活用する仕組みづくりや社会実装を促進するスキームの確立にも力を入れている。
NEDOはこうした取り組みの一環として,プロジェクトで開発する人工知能技術やロボットの中核技術を披露すると共に,ビジネスマッチング,ネットワーキングの場として「NEDO AI&ROBOT NEXT シンポジウム ~人を見守る人工知能,人と協協働するロボットの実現に向けて~」を1月16日,17日,都内にて開催した。
開発は人工知能やAI,アーキテクチャといったソフトウェア側とセンシング,アクチュエーション,インテグレーションといったハードウェア側とに分かれるが,今回ハードウェア側から「革新的なセンシング技術」として7つの技術の発表と展示が行なわれた。その中で富山県立大学,東京大学,電気通信大学,富士電機,マイクロマシンセンターの研究グループは,表面プラズモン共鳴(SPR)を応用したMEMS味覚センサーの開発を紹介した。
これはSPRによって試料中の化学物質を検出し,味を同定するというもの。ロボットの指先等に搭載することで,例えば入院中の患者や老人ホームに入所する高齢者の食の安全や健康管理に役立てることが期待できる。また,食品工場のラインに導入することで,生産した製品の品質の均一化といった用途も考えられる。
一般にSPRによる物質の検出は,金薄膜に特定の波長・入射角度で光を入射したときの反射光強度を測定するため,光源であるレーザーの角度を変化させる機構や受光部によってどうしても装置が大型化し,ロボットの搭載には適していなかった。
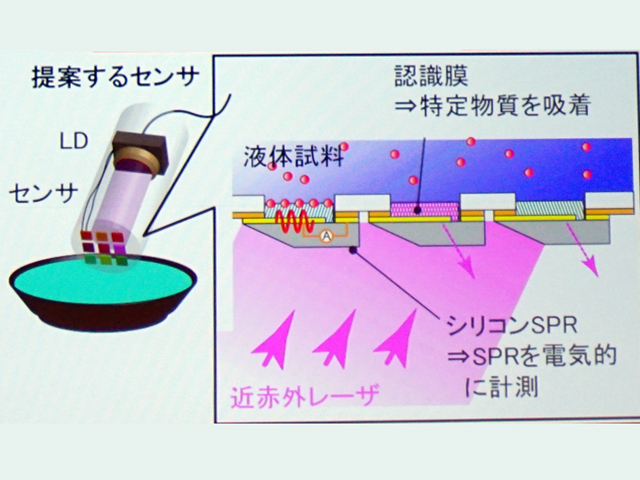
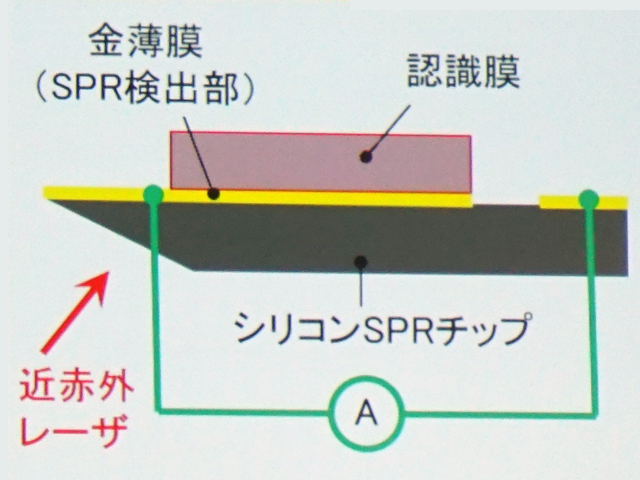
そこで研究グループは,レーザーの反射光強度を検出する代わりに,SPRによって起こる金薄膜内の電子振動を電流としてMEMSチップ上で検出する方法を提案した。このチップはシリコン上にSPRを検出する金薄膜と検出する物質に対応する認識膜を積層し,電極を取り付けた構造となっている。

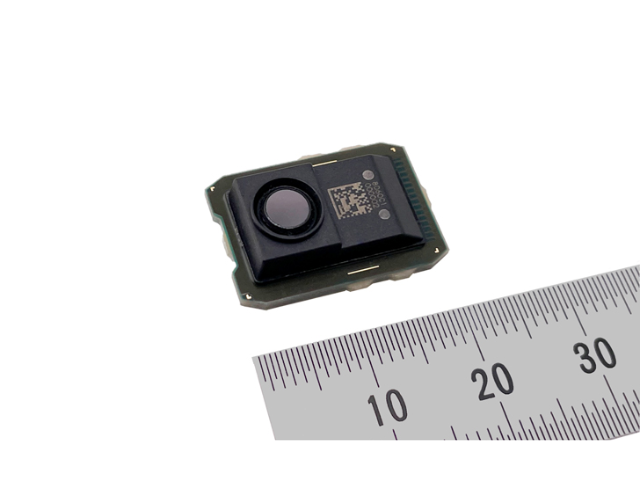
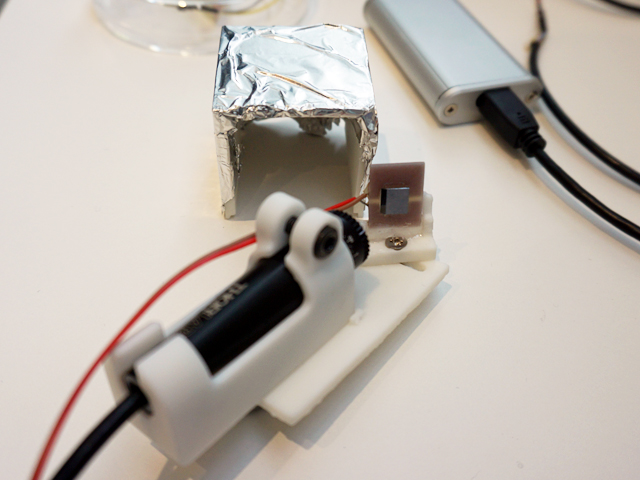
近赤外のレーザーをこのチップの裏面から入射すると,認識膜に対応した試料中の物質により,SPRの電流を計測できる。これにより入射角の調整や受光に関する光学系が不要となり,装置の小型化が可能となる。試作したチップのサイズは7mm×7mm,厚さは1mmだが,さらなる小型化も見据えている。
このセンサーは応答が早くいためリアルタイムでの計測が可能で,濃度にして0.01%程度の物質が検出できる。現在のところ,塩見,甘味,苦味に対応した認識膜があり,塩分であればナトリウムとカリウム,甘味であれば果糖とショ糖といった判別も可能だという。
研究グループでは異なる種類のチップをアレー化することで,様々な味覚に対応するセンサーとすることも考えている。また,味覚以外にも危険物質やアレルゲンの検出など,センサーとして幅広い応用が期待できる。研究グループでは,まず富士電機での製品化を目指して開発を進めたいとしている。