日立オートモティブシステムズは,自動運転における走行制御の判断を行なうAD ECU(自動運転用電子制御ユニット)が,走行環境の潜在的なリスクを予測し,疑似的にマップ化して認識することで,予測したリスクを回避できるよう走行制御する自動運転技術を開発した(ニュースリリース)。
一般道における自動運転の実用化には,他車や歩行者等の移動体による複雑な挙動や,物陰からの飛び出し等のリスクを予測し,それらを回避できるよう,ステレオカメラやレーダーなどのセンシング情報に基づき,車両走行制御の判断を行うAD ECUで安全な速度や走行軌道を計画することが求められる。
これまで同社では,歩行者等の行動変化を予測し,安全で自然な減速を行ない,衝突を防止する基本技術を開発してきた。今回,この基本技術をさらに向上させ,人間が行なう運転のように,AD ECUが潜在的に衝突リスクの高い領域を予測し,リスクを回避できる速度や走行軌道で走行する,「危険予知運転」をリアルタイムに実行する技術を開発した。
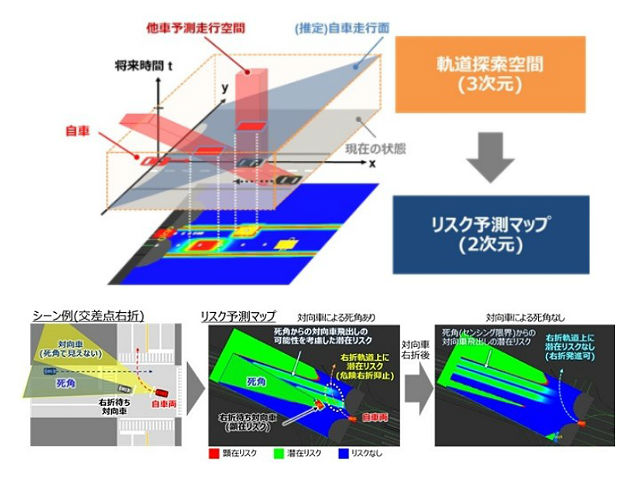
この技術におけるリスク予測マップでは,車両などの移動する対象を考慮し,衝突する可能性がある領域のみをリスク予測している。そのため潜在的なリスクが多く,安全な走行軌道を計画することが難しいとされた一般道においても利用可能。特に,死角に存在する移動体などもリアルタイムにリスク予測マップ化させることが可能という。
これまで,車両のような移動する対象のリスク予測をAD ECUで処理する場合,平面で扱われる2次元のリスク予測マップに,さらに移動に伴う経過時間を加える必要があり,その処理が3次元におよぶ膨大なデータ量になってしまっていた。
しかし,同社の今回の技術では,移動体の将来時間を2次元のリスク予測マップ上に圧縮表現して,AD ECUでの処理を軽減することができるとしている。