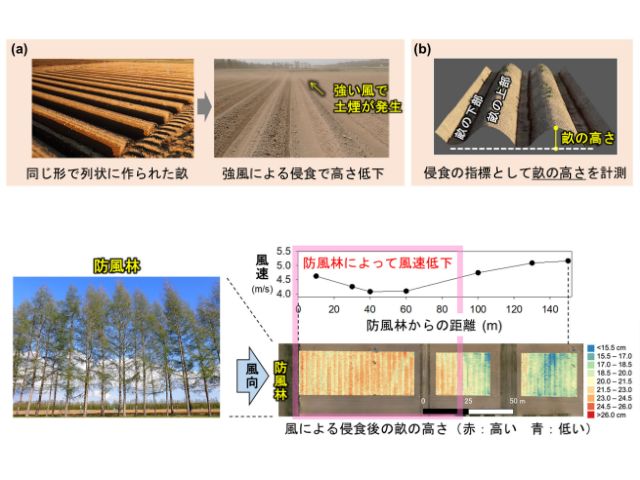
京セラはCEATECにて,光軸を一致させたLiDARとカメラによる開発中のフュージョンセンサーを展示,デモを行なっている。
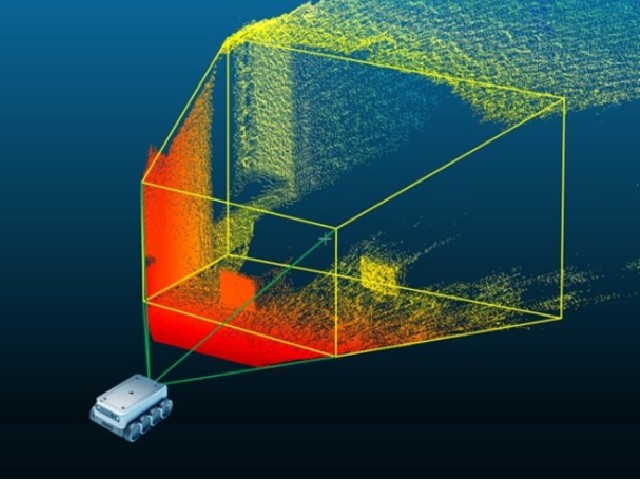
自動運転に欠かせないデバイスとして,世界中で開発が進められているLiDARは,レーザーを照射してその反射光から対象物までの距離を測定できるため,自動運転車の目としての役割が大いに期待されている。
その一方で,LiDARの最大の弱点として色の識別ができないことが挙げあれる。信号や標識の色が識別できないのは自動運転にとって致命的であるため,LiDARはカメラと連携してセンサーフュージョンを構築する必要があると考えられている。
このとき,LiDARとカメラを別々のデバイスとして準備すると,両者が見ているものを一致させるキャリブレーションが必要になるほか,それぞれのデータを処理しないとならないため,システムが煩雑になる恐れがある。
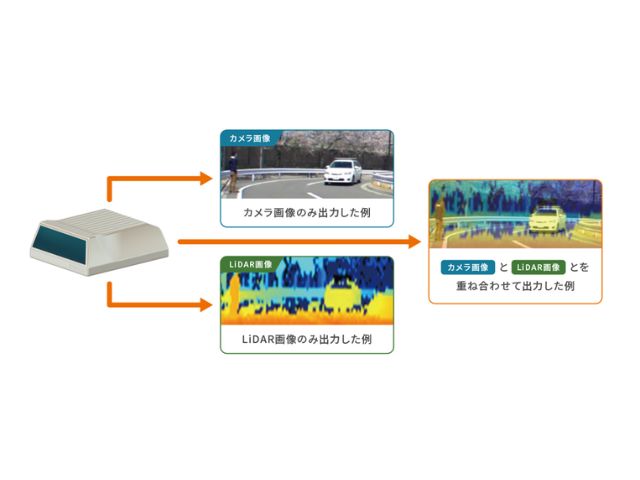
今回,京セラはLiDARとカメラを一体としたフュージョンデバイスを開発した。カメラの可視光画像に対して距離情報を重畳したデータを提供するデバイスで,独自の光学系により両者の光軸を一致させているのでキャリブレーションが不要でデータも扱いやすい。
まだ開発の初期段階のため,今回はデバイスそのものは高所に設置されて見えなかったが,距離の違う箇所に,見かけ上同じ大きさになるように調節した同じデザインのイラストを置き,カメラで撮影した画像と距離情報を表示するデモが行なわれている。
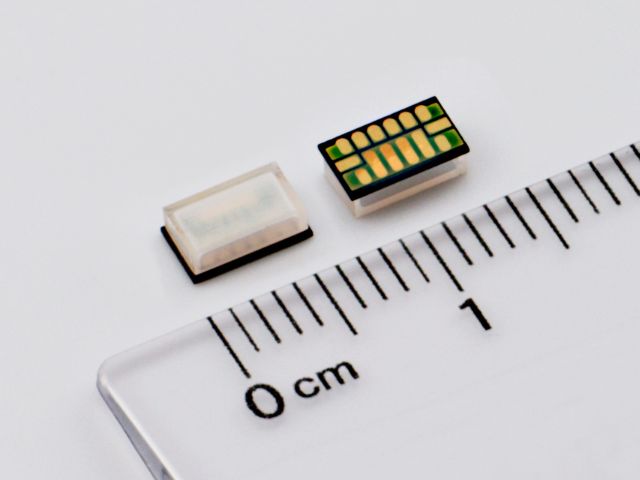
スペックについては未定としているが,試作機のLiDARは水平20°,垂直6°の画角で,垂直24レイヤー,水平60分割のデータを取得し,カメラの解像度は2044×2044となっている。LiDARは現在のところ赤外線レーザーをガルバノスキャン(4fps)しているが,製品化時にはMEMSとして小型化(10(D)×7(W)×6㎝(H))したいとしている。
製品化の時期は未定だが,同社では自動運転の他,ロボットやドローン,セキュリティ,モーションセンシングなどにも応用していきたい考えだ。