日立オートモティブシステムズは,自動運転レベル3の実用化に必要不可欠な要素技術である「1 Fail Operational」技術を開発した(ニュースリリース)。
日立オートモティブシステムズは,自動運転レベル3の実用化に必要不可欠な要素技術である「1 Fail Operational」技術を開発した(ニュースリリース)。
この技術は,自動運転システムを構成するECU等の基幹部品の1つが破損し,機能を失陥した際に,他の部品がその機能の一部を代替し,一定時間,自動運転を継続することで,安全かつスムーズにドライバーへ運転を引き継ぐことを可能にする技術。
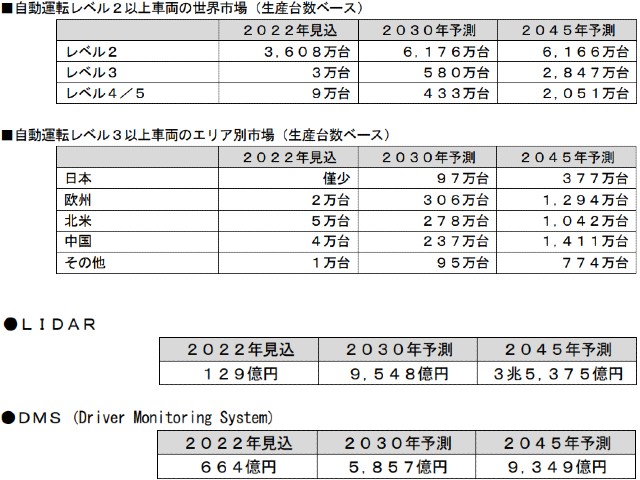
現在,自動車メーカー各社は,2020年前後の本格的な市場投入をめざし,基本的に「システムが全ての運転タスクを実施」するレベル3の自動運転車両の開発を進めている。レベル3の実用化に向けては,基幹部品の破損等によって自動運転システムの機能が停止した際に,ドライバーへの操縦の受け渡しをどのようにして安全かつスムーズに行うかが課題となっている。
新たに開発した技術は,自動運転中に1つの基幹部品が破損をして機能停止に陥る場合に,自動運転システムが継続できるよう,機能不全回避用の緊急回路や,他の自動運転関連部品に機能を代替することを可能とする冗長化アーキテクチャーによってシステムが構築されている。
これにより,基幹部品の破損による機能停止時でも,一定時間,自動運転を継続することができ,安全かつスムーズにドライバーへ運転を引き継ぐことを可能にする。
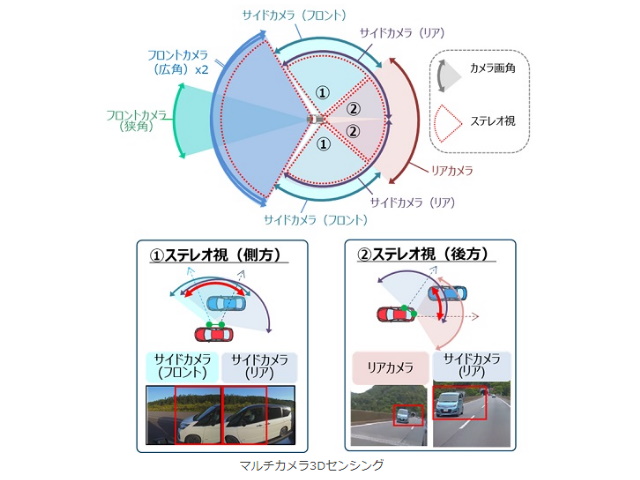
同社が構成する自動運転システムにおいては,通常,「認知」を行なう外界認識センサーから車両周辺状況を把握し,走行速度や走行軌道などを含めた複数の自動運転計画の中から最適なものを抽出する,「判断」を行なう自動運転ECUに集約する。
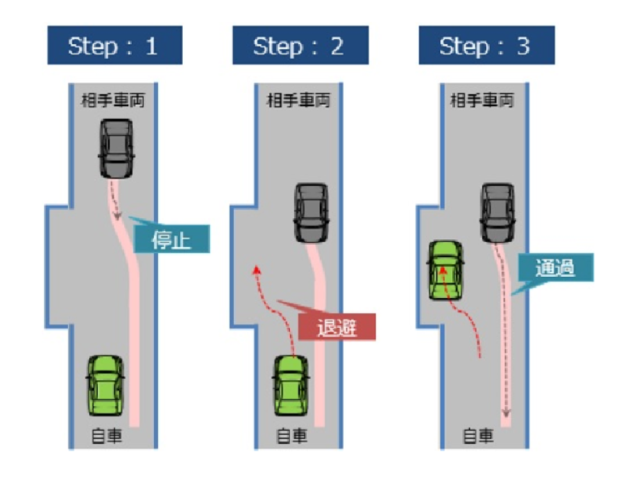
情報を集約した後,「制御」を行なうアクチュエーターが必要な制御信号を自動運転ECUからVMCに送り自動走行している。例えば,自動運転ECUの機能停止が発生した場合,今回の技術を用いることで,VMCが自動運転ECUの車両制御機能の一部を代替し,ドライバーに対して運転の引継ぎを促しながら,自動走行10秒間維持することが可能となる。
自動運転ECUからVMCへ安全確保可能な軌道を送信し,双方で多重に軌道を確保することで,段階的な縮退運転への移行を実現する。
このように,機能失陥発生直後から,システム側に異常があることをドライバーへ警告しつつ,自動走行を一定時間維持することで,自動運転から安全かつスムーズに手動運転に切り替えることが可能となる。同社はこの技術について2020年の実用化を目指すとしている。