









■自動運転を実現するSLAM
そこで登場するのが,センサーを用いて周囲の状況を把握し,地図データにマッチングさせることで自らの位置を正確に推定するSLAM(Simultaneous Localization And Mapping)と呼ばれる,ロボットでも利用されている技術だ。
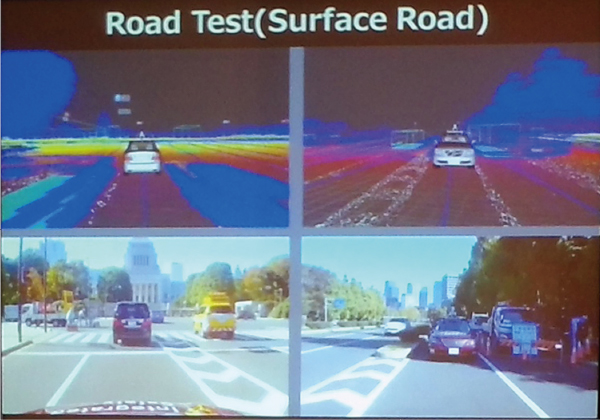
SLAMで自動車は周囲の状況を立体的にセンシングして障害物を検出すると共に3D地図を作成し,それをデータベースの地図とマッチングさせることで,30 cm以内の誤差で自分の位置を推定する。
データベースの地図には道路だけではなく,道路脇の信号機,電柱,ガードレールといった周辺の構造物の3D情報のほか,制限速度や一方通行,車線の数など,センサーでは認識できない交通規制に関する情報も格納されている。
さらに,センサーの検出領域外の情報,例えば交差点の手前でどの車線を走っていれば良いのか,またブラインドコーナーでは何キロで進入すれば良いのかといったことも前もって計算できるようになるので,車の情報処理や制御に余裕を与えることも可能になる。
■SLAMのセンサー
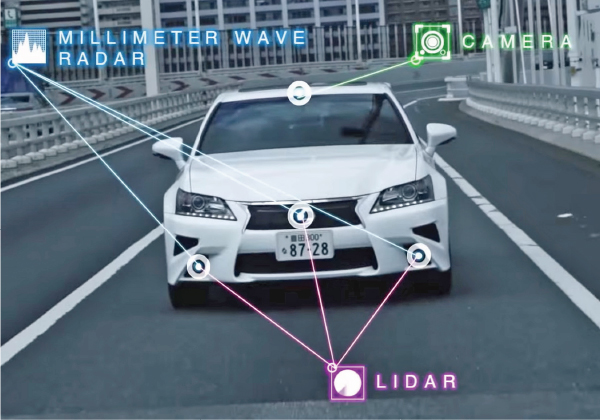
SLAMで使われるセンサーは赤外線センサー,特にレーザーレーダーよりも絞った多数のビームを利用し,数cmの分解能を持つTOF(Time Of Flight)方式のLiDAR(Light Detection And Ranging)だ。
LiDARは点群データを得て詳細な3D地図を作成できることから,SLAMのデータベースの地図の作成にも使われている。
ミリ波レーダーは遠距離まで届くが,解像度が30 cm程度と低く,SLAMで必要な詳細な地図は作製できない。また,カーナビゲーションシステムでお馴染みのGPSも10 m以上の誤差があるため,こちらもSLAMでは単独で使用できない。
さらにLiDARは,反射率の違いから車線の白線を認識することができる。これもSLAMを実現する上で大きなポイントとなっている。
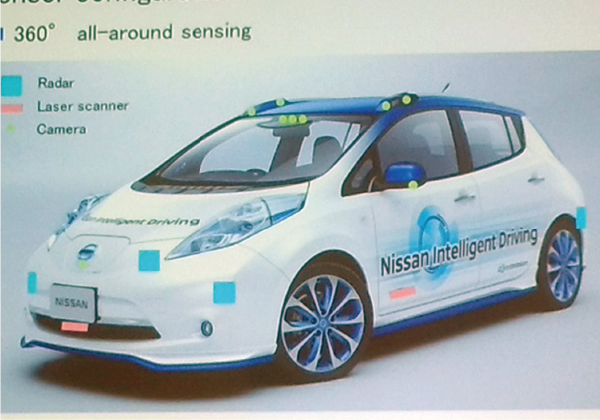
今回のモーターショーに合わせ,自動車メーカー各社は高速道路などでADASのレベル2相当の自動運転のデモを公開している。これらの車両はSLAMを利用しており,車両周囲にLiDARをめぐらしている。
例えばトヨタがレクサスをベースに作成した車両は6個,日産がリーフをベースにした車両には4個のLiDARが搭載され,周囲360度をセンシングしている。















