3. 回転式LED送信機を用いたISCシステムモデル
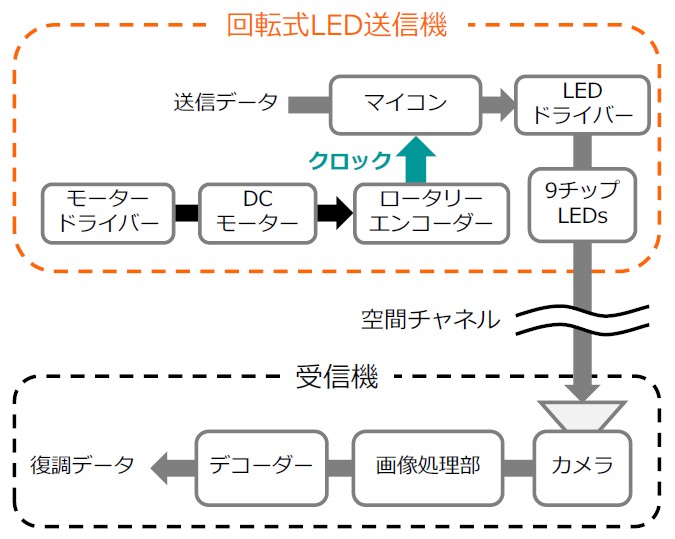
図5に回転式LED送信機を用いたISCのシステムモデルを示す。送信機の構成,及び,動作については概ね第2章で説明した通りであることから,ここでは受信機の動作について説明する。
受信機はカメラ,画像処理部,デコーダーで構成されている。まず,回転式LED送信機が回転しながら送信するデータをカメラが画像として捉える。画像処理部ではその撮影画像から回転毎の点灯パターン(つまり,LED光の残像)の位置を検出し,それらを輝度値として抽出する。
デコーダーでは抽出された輝度値を基にデータを復調する。本研究ではOOK変調された信号が送信されてくるため,デコーダーでは輝度値を閾値判定し,設定した閾値以上であれば‘1’,そうでなければ‘0’と判定する。
4. 実験
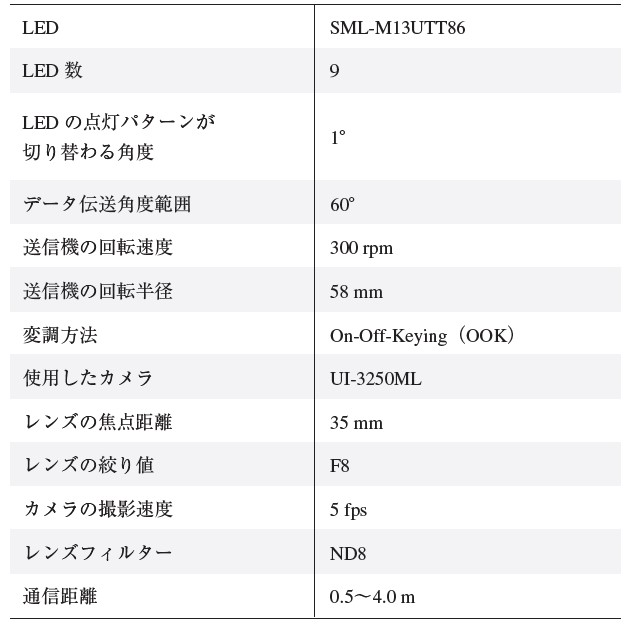
第3章で説明したシステムモデルを用いて通信実験を行った。表1に実験パラメータを示す。ここでデータ伝送角度範囲について説明する。図4で示した通り,300 rpmで回転する送信機を撮影速度 5 fpsのカメラで撮影した場合,点灯パターン180度分を1枚の画像で捉えられる。
しかしながら,図4から分かるように,捉えられた点灯パターンの左端と右端では,点灯パターン同士が重なってしまう。これは本送信機が垂直軸を中心に回転することに起因しており,重なった点灯パターンからデータを復調するのは困難である。
そこで,捉えられた点灯パターンの画像の中心から±30°の範囲(合計60°の範囲)をデータ伝送角度範囲と設定し,受信機ではこの範囲の信号を復調した。
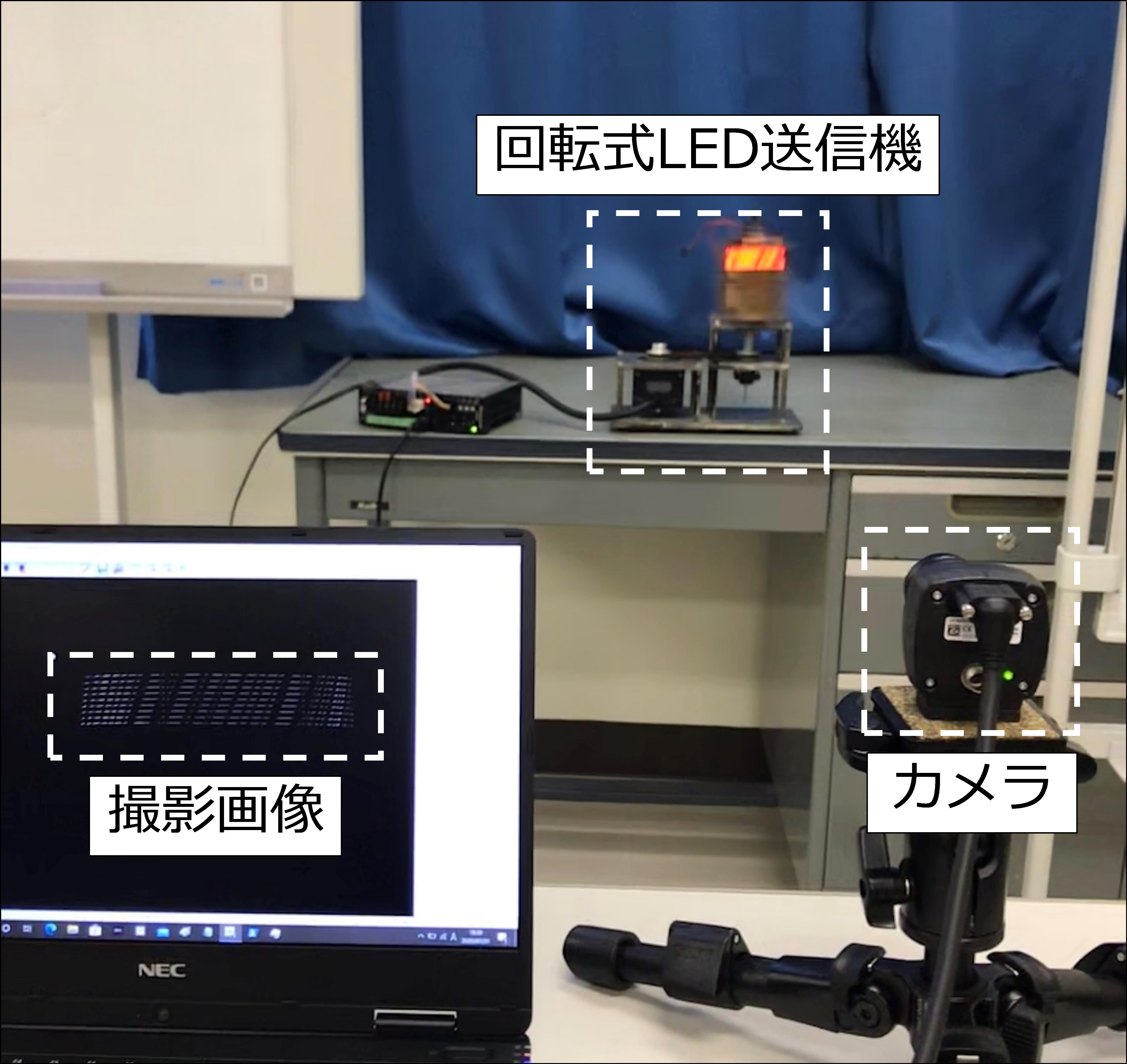
図6に実験風景を示す。この図のように,送信機のLEDと受信機のカメラが互いに向かい合うように送受信機を設置した。そして,送受信機間の通信距離を変えながら通信実験を行い,ビット誤り率を測定して本通信システムの復調性能を評価した。本実験では,カメラで捉えられた回転毎のLED点灯パターンの位置は既知とした。また,復調時に用いる閾値は,LEDの点灯時と消灯時の輝度値を基に事前に決めた値を用いた。
実験結果のグラフは文献11)に掲載されているものを参照していただきたく,本稿では割愛する。実験の結果,通信距離2.5 mまで誤りが発生することなく,エラーフリーを達成した。また,距離3.0 mからエラーが発生することも確認した。本稿では説明を割愛したが,筆者らは事前に通信実験のシミュレーションも行っており,シミュレーション結果と実験結果を文献11)では比較している。
比較の結果,2つのグラフが似たようなカーブを描いていることから,実験で得られた通信性能の妥当性は十分であると結論付けた。本結果で示した通信距離を短く感じるかもしれないが,本実験で用いたチップLEDのサイズは非常に小さいものであり,カメラのセンサ上に写る大きさも非常に小さい。そのサイズは通信距離が長くなるにつれてさらに小さくなり,ある距離を超えるとカメラのセンサではチップLEDを認識できなくなってしまう。
その距離が本実験のパラメータでは約4 m前後であり,エラーが生じたことを裏付ける結果となっている。通信距離をさらに延ばすためには,LEDの物理的なサイズを大きくする,もしくは,カメラレンズの焦点距離を大きくすればよい。
回転式LED送信機を用いたこの実験での通信速度は2.7 kbps であった。なお,表1のパラメータを用いて9個のLEDが回転せずにOOK変調された信号を送信する従来手法の場合の通信速度は45 bpsである。このことから,今回の回転式LED送信機を用いた実験では従来手法の60倍の通信速度向上に成功したと言える。この通信速度はLED数を増やすなどパラメータを変更することでさらに増加可能である。