3. 知覚テープによる身体動作モニタリング
3.1 知覚テープの基本特性
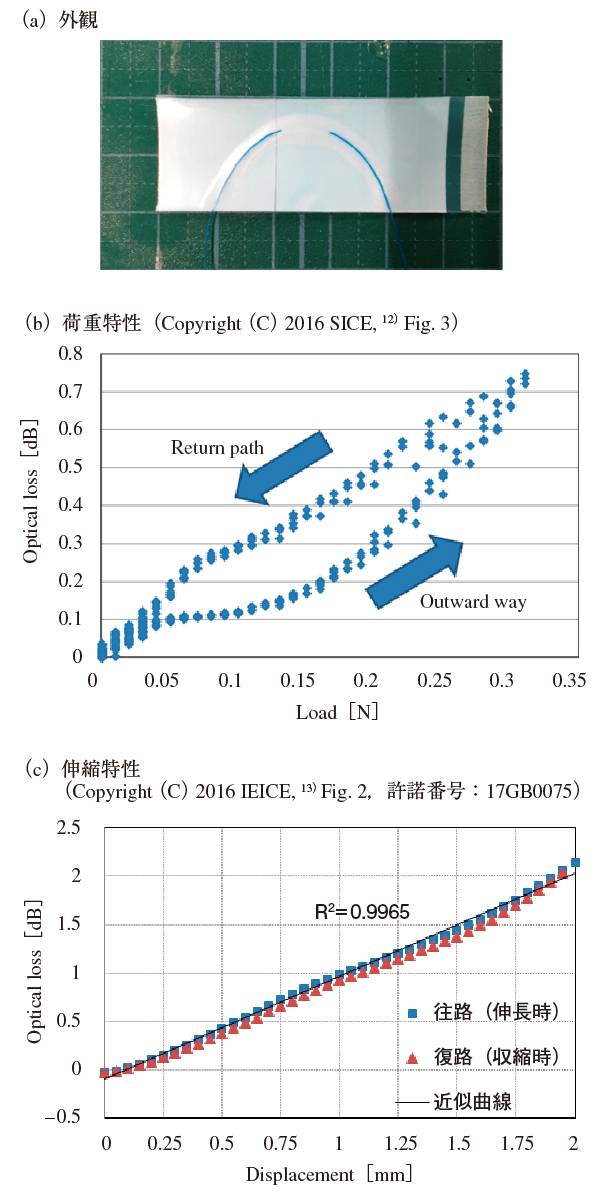
図2(a)にヘテロコア光ファイバを埋め込んだ知覚テープの構造図を示す10, 12)。図2(a)より,厚さ0.05 mmの医療用ポリウレタンフィルムテープに,ヘテロコア部を含む伝送路を横幅30 mm,縦幅15 mmの半円形状にした状態で配置している。このテープを紙面方向に曲げる,もしくは伸縮が付与される際に,ヘテロコア部分の曲率形状が変化する。そのため,テープ自体の形状変化を光強度変化で検出可能である。図2(b)にテープに付与された荷重に対する光損失特性を示す。図2(b)より,テープに付与された0.3 N程度の荷重に対して感度を有することが確認された。また,図2(c)に縦方向のテープの伸縮に対する光損失特性を示す。図2(c)より,伸縮量に対して2 dB程度の光損失変化を確認した。このテープを皮膚に貼ることによって,身体動作や生体情報に伴って生じた皮膚上の僅かな伸縮変化を検出可能であると考えられる。
3.2 手指動作モニタリング
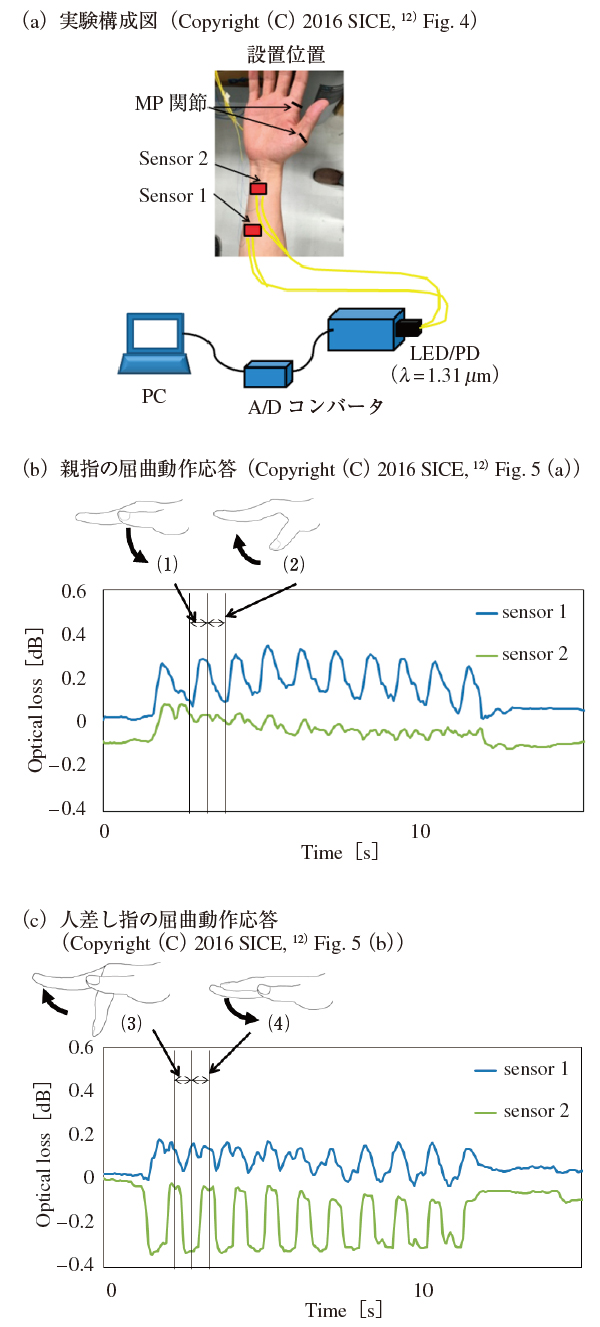
知覚テープの応用例として,手指動作のモニタリング実験を行った。図3(a)に実験構成図を示す。図3(a)より,光源に波長1310 nmのLED,受光部にフォトダイオード,ADコンバータを用いた。手指を動かす際には,腱・筋肉によって前腕部の皮膚表面には僅かな形状変化が生じる。そのため,テープは右腕の腱付近の位置に2点配置した。実験では,人差し指と親指のMP関節をそれぞれ繰り返し屈曲させた際の光損失変化を取得した。図3(b)に親指の屈曲動作に対するモニタリング結果を示す。図3(b)より,主にSensor-1が親指の屈曲動作に対して応答した。一方,図3(c)に人差し指の屈曲動作に対するモニタリング結果を示す。図3(c)より,人差し指の屈曲動作に対してSensor-2が主に応答した。これは,各指動作に応じて前腕部表面に異なる伸縮が生じる事を示している。結果より,手指の動作に対して前腕の皮膚表面に生じる変化を知覚テープによって検出可能なことを示した。
3.3 嚥下動作モニタリング
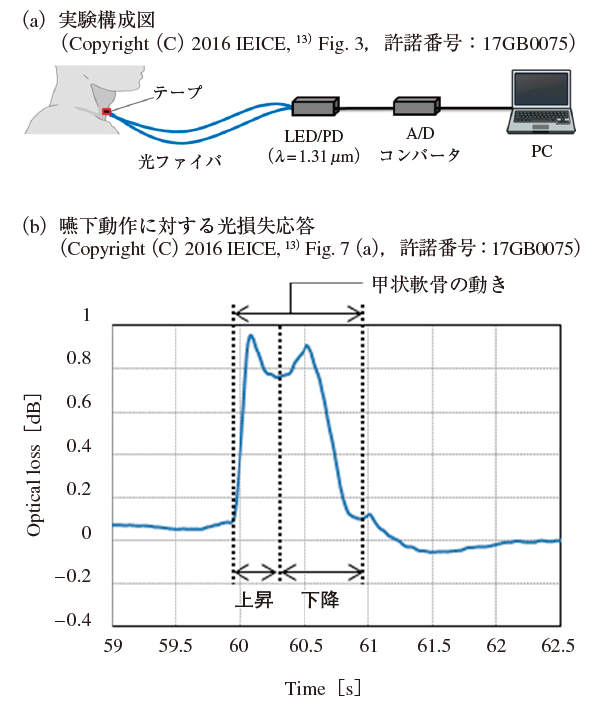
次に,嚥下動作のモニタリング応用例13)について紹介する。図4(a)に実験構成図を示す。図4(a)より,知覚テープは喉仏付近に配置された。嚥下動作の際,甲状軟骨が上下に移動するが,この上下運動によって生じる喉元の皮膚表面の変化をテープによって捉える。尚,実験は20代の健常人男性によって行われた。図4(b)に嚥下動作に対する光損失応答の結果を示す。図4(b)より,嚥下動作に対してテープが追従して形状変化していることが確認された。また,甲状軟骨の上昇及び下降動作に対してそれぞれ光損失波形のピークが現れたが,これはテープが張り付けられた皮膚の下部を甲状軟骨が通過する際に,皮膚が隆起するために生じたと考えられる。結果より,嚥下動作を光損失波形の応答によって検出可能なことを確認した。