岡山大学発ベンチャーのビジュアルサーボは,複眼カメラ動画像を用いたAI空間画像処理を行なうことで,光の入射角度や照度などの光環境の時間的変化に耐性を持つ空間計測系を構築しその性能実証に成功した(ニュースリリース)。
空間計測センサーとして市販され一般に用いられている,画像情報と距離情報を組み合わせたRGB‐D画像を用いる空間計測手法は,距離計測に赤外線が用いられている。この手法は,太陽光に含まれる赤外線が外乱として働くため,屋外での計測は難しいという問題があった。
同社は,ステレオビジョンを用いた空間計測について研究を続け,これまでに,動く任意対象物の3次元位置姿勢のリアルタイム計測に成功し,泳ぐ魚の寸法計測などを行なってきた。
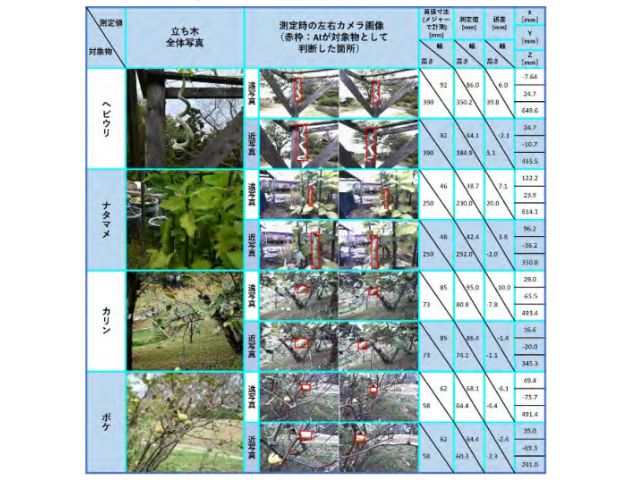
今回同社は,岡山市半田山植物園で2024年9月に,園内の果樹(ナツメ,ザクロ,ヘビウリ,ナタマメ,カリン,キンカン,ボケ)の果実計測実験を行なった。果物・野菜収穫用AI空間センサーを用いて,果樹になっている果実の位置・寸法のリモート計測屋外実証実験に成功し,果樹園での空間計測の有効性を確認した。
ある時刻の複眼カメラ画像情報の比較のみに基づく画像処理は,時々刻々変化する時変光環境外乱の影響を受けないという特徴がある。撮影時の光環境は左右カメラの入力画像に同時かつ同等に反映され,過去の光環境状態から影響を受けることはない。今回の空間計測システムは,この複眼光環境耐性を利用しているため時変光環境外乱に耐性を持つ。
この画像計測方法は,左右複眼カメラに同じ対象物が写っていれば,その位置・姿勢・寸法の計測が可能。実証実験では,自動収穫ロボット用空間センサーとしての能力を確認するため,植物園内の立木果樹の木陰に見え隠れする果実の非接触計測実験を行なった。
実験の結果,遠方写真より接近写真での寸法計測はより誤差が少なくなっていた。また,ナツメ,ザクロ,キンカンの計測結果では,小さい果実の場合でも計測が可能なことが分かった。
今回の実験により,(1)屋外立木果樹に実る果実を対象とした位置・寸法の非接触空間計測が可能なこと,(2)カメラ果実間の検出距離の補正後,近距離での果実寸法の平均誤差は約5mm以下であることが分かった。
このことから,ロボットハンドが接近後,採取時には正確な計測が可能であり,収穫ロボット用空間センサーとして望ましい機能を備えていることが分かった。
研究グループは,果物・野菜収穫用 AI空間センサーは,収穫する果実の写真を現場の果樹園で撮影するだけで対象果実のコンピュータへの指定が完了し,操作が簡単だとしている。