農業・食品産業技術総合研究機構(農研機構)は,ロボットトラクタを利用した作業の一層の省力化・省人化に不可欠なトラクタ作業機の交換作業を自動化する技術を開発した(ニュースリリース)。
トラクタの作業機交換は,トラクタと作業機の位置と角度を正確に合わせる必要があることから,熟練者にとっても難度が高く,危険を伴う作業でもある。現在,市販されている目視監視型のロボットトラクタでも作業機交換は手作業で行なわれている。
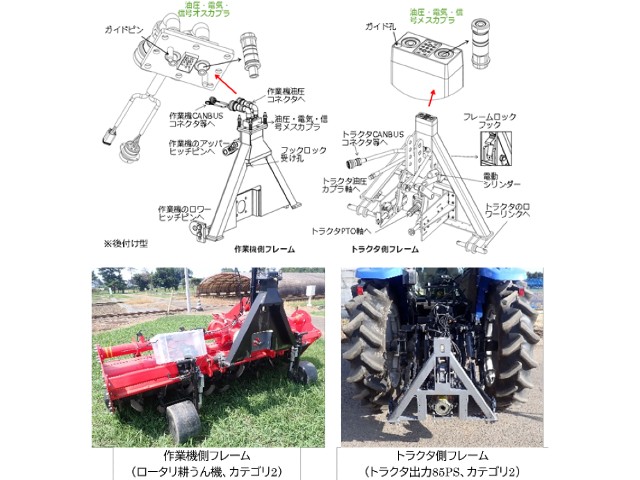
今回,作業機自動着脱用ヒッチ機構を開発し,標準オートヒッチを利用した熟練者による着脱と比べ作業時間が約5割短縮できる実験結果を得た。
また,作業機交換を自動化するためには,トラクタと作業機の相対的な位置や方向を正確に合わせる必要がある。ロボットトラクタの位置制御で一般的に用いられているRTK-GNSSのみで作業機位置の計測及びトラクタの誘導を行なった場合,自動装着の成功率は70%が限界となり,接近時の位置制御の精度向上が必要だった。
そこで,トラクタ側にRGBカメラを装着し,作業機側に取り付けた基準マーカを検出することで両者の相対位置を高精度に計測できるマシンビジョンシステムを構築した。
さらに作業機装着位置へトラクタを接近させる走行経路の生成手法の改良と,近接時にトラクタを極低速(0.1m/s)で移動させる手法を開発したことで,位置誤差±2cm,角度誤差±2°以内の高い精度での位置合わせを実現した。
なお,屋外でマシンビジョンを用いるため外乱光の影響を受けるが,一定の外乱光条件(照度10万lux以下,カメラへの入射角30°以上)であれば,平坦なコンクリート及び草地上において作業機の自動装着成功率100%を達成しているという。
研究グループは今後,開発した要素技術を組み合わせ,「ほ場内作業→ほ場間移動(作業機保管場所への移動)→作業機交換→ほ場間移動→ほ場内作業」の一連の工程を自動化できる「作業機自動交換システム」としての確立を目指す。さらにAIにより,作業機自動交換における安全性を高める手法を検討する。
研究グループは,ロボット農機を活用したスマート農業の価値を高める効果が期待されることから,究成果をより早期に社会実装できるように,開発技術の一部を利用して有人トラクタ向けの作業機着脱アシスト機能付きガイダンス装置の開発も進めていくとしている。