産業技術総合研究所(産総研)は,視覚情報から物体間に働く力を想起するAI技術を開発した(ニュースリリース)。
人間は物体にかかるおおまかな力や物体の柔らかさなどを視覚のみから経験的に推論し作業することができる。例えば崩れやすそうなものや柔らかそうなものを見つけたら,崩したりつぶしたりしないように丁寧に扱わなければいけないと考える。
このように人間は経験に基づき視覚から異なる感覚を呼び起こすことで,多様な行動を計画することができるが,ロボットにおいて,搭載される視覚センサーだけでは,このような感覚を再現することは困難だった。
例えばロボットにおける運動のダイナミクスに関する推定は,一般的にロボットと物体の接触後に力覚センサーや触覚センサーを使って判断していた。しかし,この判断法では対象物が崩れてしまうなど,物体に接触してからでは遅い場合において,器用な作業をすることは難しい。
これに対して,視覚から運動のダイナミクスに関するような別の感覚の想起(クロスモーダル)を簡易に実現することができれば,安価なセンサーから人間のような行動計画を実現することができ,将来のロボットや自動運転システムなどへの貢献が見込まれる。
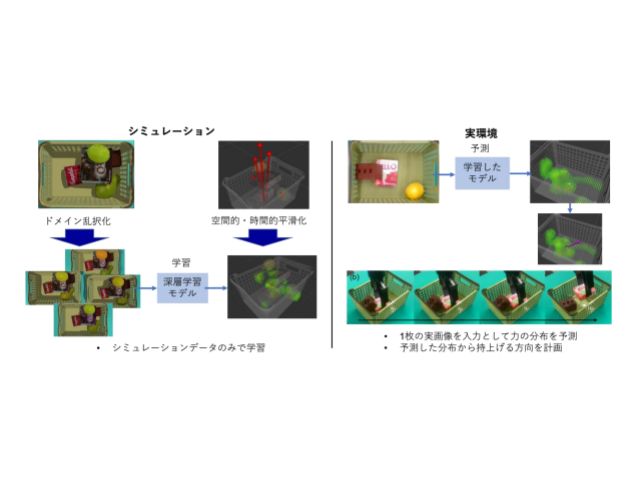
研究では,このような人間らしい「視覚から異なる感覚を想起する能力」をAIが再現することに成功した。物理シミュレーター上で物体間にかかる力を可視化した仮想的な経験データを構築し,この仮想的な経験から視覚と別の感覚(力)の関係をAIが学習することでこれを実現した。
実験では,カメラ1台で未知の物体間に発生するおおまかな力分布をリアルタイムで可視化することに成功した。また力分布を理解したロボットが周辺の物体の損傷が小さくなるように指定された対象物を持ち上げるなど,人間らしい推論に基づく行動ができることを確認した。
研究グループは,工場や物流倉庫におけるロボットによる物体操作や,今後家庭に普及するスマートロボットへの展開が期待される成果だとしている。