 豊橋技術科学大学の研究グループは,運動機構やそれを設置した機械台の力学モデルやモデルパラメータが未知であっても,10nmオーダの超精密位置決め制御系を簡単に設計できる方法を明らかにした(ニュースリリース)。
豊橋技術科学大学の研究グループは,運動機構やそれを設置した機械台の力学モデルやモデルパラメータが未知であっても,10nmオーダの超精密位置決め制御系を簡単に設計できる方法を明らかにした(ニュースリリース)。
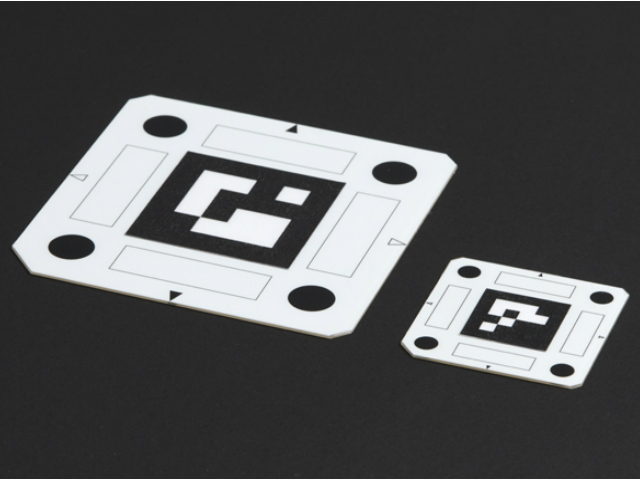
工作機械や半導体製造装置に代表される産業機械において,機構の位置決め精度と高速応答性は,装置性能を左右する基本かつ重要な特性となる。しかし要求精度が高くなると,機構やそれを載せる機械台に起因する,従来問題とならなかった微動特性が問題となる。
高速な応答は大きな反力を発生するため,機構各部を励振する。微動振動の抑制には能動制振装置の利用やハードウェア的な改良が効果的だが,応用範囲が制限され,コストが増大してしまう。詳細な力学特性の情報を利用したコントローラを利用する方法も有効だが,必要な労力,時間を増大させ,専門家に調整依頼する必要がある。
そこで今回研究グループは,ハードウェアはそのまま利用し,事前に力学特性情報を必要とせず,簡単なコントローラ設計・調整により,振動を効果的に抑制し超精密位置決めを実現する方法を提案した。
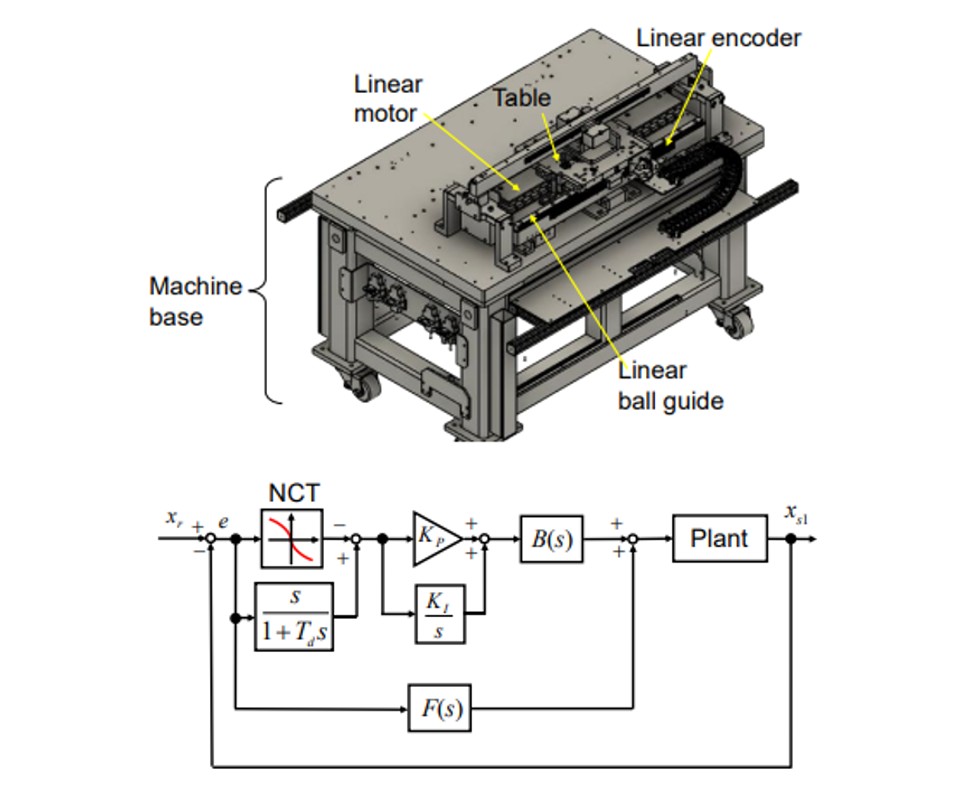
制御系は,研究グループが提案している Nominal Characteristic Trajectory Following(NCTF)制御系と,バンドパスフィルタや微分補償器からなる振動抑制補償器より構成され,順次決定される。補償器の役割は単純明快で,調整する変数が少なく,専門的知識なしで簡単に決定できるという。
前者は,指定の入力信号に対する開ループ応答波形を組み込み,2個のゲインを手順通りに調整することで設計でき,後者は2個のゲインを順次決定すれば完了する。得られた制御系は,摩擦特性に代表される顕著な非線形特性を持つ機構でも超精密な位置決めを実現する。また,後者は他の制御系と組み合わせて利用することも可能だとする。
提示した制御系設計法の有効性は,実験により実証したという。この論文では,性質が異なる2種類の振動を抑制するように制御系が調整されているが,さらに多くの周波数の異なる振動が生じる場合や,抑制したい振動の基準が異なる場合,振動の性質が異なる場合などもある。
研究グループは,対応できる場合を増やし,最終的にこれらの問題を総合的に解決する方法を明らかにしたいとしている。