 産業技術総合研究所(産総研)は,製造現場における加工物などの位置姿勢測定のための新たな測定デバイス,3DSマーカーシステムを開発した(ニュースリリース)。
産業技術総合研究所(産総研)は,製造現場における加工物などの位置姿勢測定のための新たな測定デバイス,3DSマーカーシステムを開発した(ニュースリリース)。
ARマーカーを工作機械などの製造装置や医療,自動車,航空機の基幹部で用いられる部品加工技術へ応用するには,位置姿勢測定に高い精度が求められる。また,製造現場ではマーカーが汚染される可能性があるため,測定対象に直接マーカーを描画,加工することが考えられる。その場合,測定対象の材料,色彩,表面形状に応じて,測定条件が異なってしまう。
従来のARマーカーが持つ産業応用への課題の一つに,マーカーがカメラと正対した場合,特にマーカー平面に対して垂直な方向の位置精度が低下し,正確な位置姿勢が測定できないことがある。カメラ画像により,マーカー平面に対して平行な方向の位置検出精度を向上させるためには,カメラ視野全体でマーカーを撮影することが望ましい。
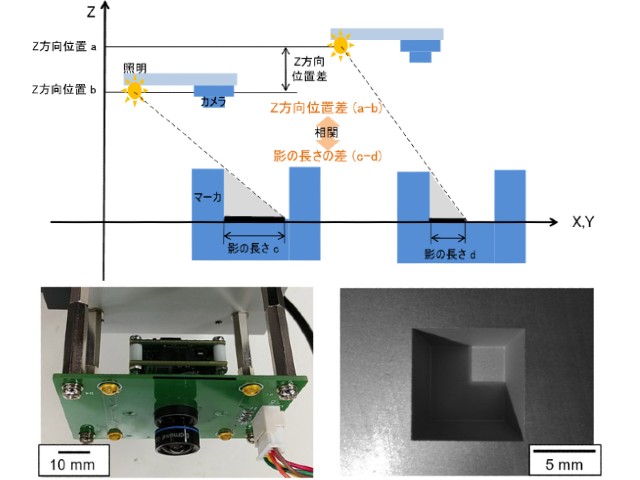
しかし,このときカメラとマーカーは正対することとなり,従来のARマーカーの測定原理では,垂直方向の位置決定の精度低下に関する問題点を解決できないという課題があった。そこで研究グループは,三次元形状により,上面のエッジと照明がつくる影をカメラで撮影し,マーカーの位置姿勢を検出する測定原理を提案した。
影の長さを精度良く測定することで,カメラとマーカーが正対していてもXY方向と同等の精度でZ方向の距離を測定することができ,マーカーが傾いたとしてもカメラと照明の相対位置,マーカーの高さ,および影の長さから,Z方向の距離とマーカーの傾きを分離することができる。
影の測定は,マーカー材料の表面粗さ,色彩などの影響を受けにくい。照明とマーカーがつくる影を活用した立体形状マーカーであることから,このマーカーを3-Dimensional shape using Shadow(3DS)マーカーと名付けた。
アルミニウムに縦横10mm,深さ8mmの直方体穴を放電加工して3DSマーカーを作製し,カメラで3DSマーカーに投影される影の位置および形状を撮影した。これらは照明の点灯位置で変化する。これらの画像の中から特徴点を抽出し,マーカーのX・Y・Z位置および姿勢(ロール,ピッチ,ヨー)の6軸を一回の測定で同時に導出する。
繰り返し精度は3DSマーカーの位置をX方向およびZ方向に0.5mm間隔で各5mm変化させ,測定を合計110回行ない,各位置姿勢の測定値の標準偏差とした。その結果,3DSマーカーの位置精度は約3µm,姿勢精度は約0.02°だった。
研究グループは,このシステムが,変種変量生産システムなどにおいて,搬送や加工物の位置決め工程の自動化に貢献するとしている。