北海道大学の研究グループは,動物のように体を動かしながら泳ぐ,1mmより小さな分子ロボットを人工的に作り出すことに成功した(ニュースリリース)。
北海道大学の研究グループは,動物のように体を動かしながら泳ぐ,1mmより小さな分子ロボットを人工的に作り出すことに成功した(ニュースリリース)。
血管のような狭い空間を自在に泳げる小さな分子ロボットを継続的に泳がせるためには,分子ロボットが変形を続けられ,かつ,その変形挙動が分子ロボットの移動を可能にするものであるという二つの課題があった。このうち研究グループは2016年,一つ目の課題を解決した「屈曲を自ずから繰り返す分子ロボット」を発表している。
小さな分子ロボットが水中で受ける力は,重力や浮力など,大きさに比例する力はあまり働かない一方,粘性抵抗が相対的に大きく働く。このような環境では,体を曲げることで前進したとしても,体を元の形に伸ばすと元の位置まで後退してしまう。これが,二つ目の課題の背景にある。
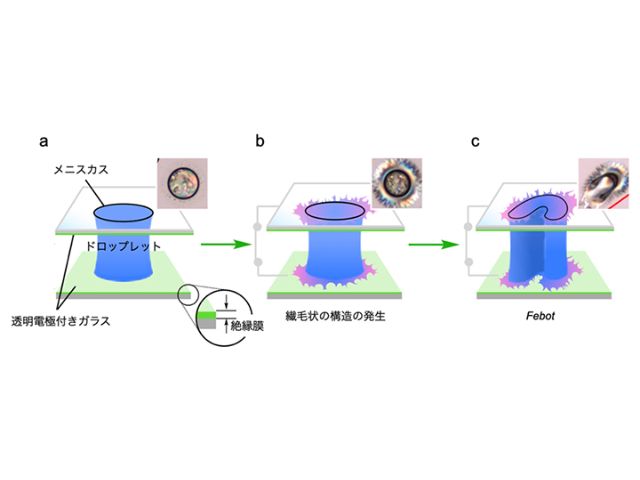
研究では,化学的に合成した分子(アゾベンゼン)と,サラダ油などに含まれるオレイン酸という分子を混合した結晶(分子ロボット)を作った。この分子ロボットの大きさは,縦数十μm,横数百μm,高さ1μm程度。スライドガラスで作った幅28mm,奥行17mm,深さ0.3mm の水槽にこの分子ロボットを入れ,運動のエネルギー源になる青色の光を照射した。
光学顕微鏡で観察すると,分子ロボットは自身の一部をヒレのように動かすことで前後に動いた。前進する距離と後退する距離に差のある分子ロボットも存在し,それらは泳いで移動することができた。分子ロボットには,ヒレを前方にして泳ぐもの(犬かき型)と,ヒレを後方にして泳ぐもの(ばた足型)があった。遊泳速度は秒速10μm(1秒間に体長の約1/10程度),速いもので秒速15μmに達し(人間に換算すると時速500mに相当),小さなものは屈伸型の運動では水中で泳げないとする従来の考え方を大きく覆えした。
遊泳方向を決める因子や,遊泳速度・遊泳距離を決める因子について,力学計算により探索した。その結果,分子ロボットの上下運動が制約されるような平面状の狭い空間を条件として設定したとき,小さなロボットは泳げることが示された。なお,この仮定を含んだモデル計算については,ヒレの曲がり方によって泳ぐ方向が決まる事実や,遊泳速度についての実験結果と良く一致し,整合性が認められたという。
この成果について研究グループは,自動運転型の分子ロボットの開発の進展が期待されるとともに,人工的なものに限らず,小さな生命体の狭い空間での動き方について,理解が進展する可能性もあるとしている。