ソフトバンク(SB)と東京海洋大学は,通信対象を自律的に追尾する自動トラッキング技術による水中光無線通信システムを開発し,陸上から水中の遠隔操作ロボット(ROV:Remotely OperatedVehicle)に光無線通信経由で指示を与え,リアルタイムに制御する実証実験に成功した(ニュースリリース)。
ソフトバンク(SB)と東京海洋大学は,通信対象を自律的に追尾する自動トラッキング技術による水中光無線通信システムを開発し,陸上から水中の遠隔操作ロボット(ROV:Remotely OperatedVehicle)に光無線通信経由で指示を与え,リアルタイムに制御する実証実験に成功した(ニュースリリース)。
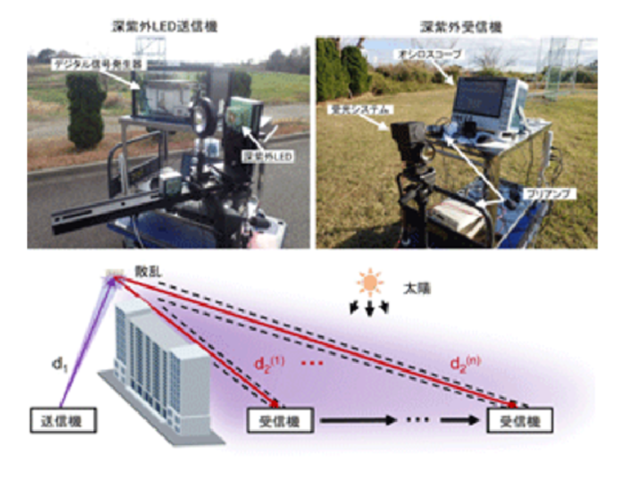
水中無線通信ネットワークへの期待が高まっているが,水中では電波がほとんど透過しないため,通信には音波が使用されてきたが,遅延やノイズなどの外乱の影響が大きく,伝送速度も数百kb/s程度と限られていた。
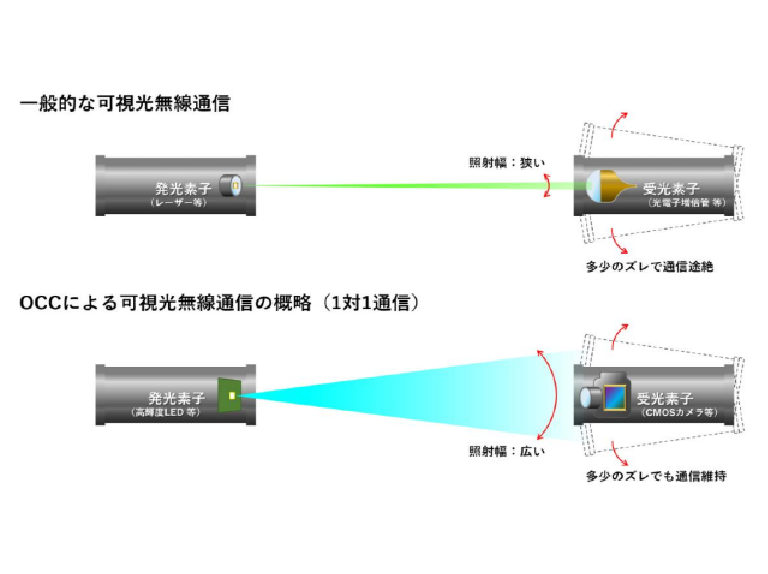
そこで,可視光を使用した水中通信の研究が進められてきたが,高出力を維持したまま遠方まで光を照射するためにビーム幅の狭いレーザー光(概ね±10~15度程度)を使うため,送信機と受信機の光軸を正確に一致させる必要がある。
そこで研究グループは,姿勢の保持が難しい水中航走体などに対し,光無線通信の安定的な通信を実現する技術として,画像認識によるトラッキング技術に着目し,研究を進めてきた。
実証実験では,画像処理技術や精密制御技術を駆使して,水平方向に約60度,垂直方向に約60度の自動追尾性能を持ち,ROV(水中ロボット)本体から有線接続で独立して動作するトラッキング式水中光無線通信機を開発した。
照射角7度の可視光無線通信機を使って,全長50mの船舶運航性能実験水槽の水深約1mで,2台の通信機(親機と子機)が互いを捕捉して自動で光軸を合わせ,さらに子機に接続された ROVを陸上のパソコンから操作する実証実験を行なった。
今回,新たに開発したトラッキング式水中光無線通信機を活用したシステムにより,照射角約7度の光無線通信機を活用した場合でも,双方がトラッキングを行なうことで,水平約 60度,垂直約60度の範囲で通信機がそれぞれ移動しても,通信が途切れずに約10Mb/s以上の速度でデータ通信を行ない,さらに子機に接続されたROVを陸上のパソコンからリアルタイムで遠隔操作する実証実験に成功した。
子機はROVと分離しているため,子機が親機と通信するための姿勢・移動制御がROVの姿勢・移動制御に及ぼす影響が少なく,安定した通信の維持とROVによる作業の自由度を両立できたという。
研究グループは,Beyond 5Gによる海の産業革命の実現に向けて,より高度なトラッキング技術の研究開発を進め,通信距離1kmを超える長距離水中光無線通信の実現による,全球的な海中通信網の確立を目指すとしている。