 情報通信研究機構(NICT)とソニーセミコンダクタソリューションズは,60GHz帯のミリ波を用いる次世代TransferJet通信技術(TransferJet X)を搭載した自律移動サービスロボットによる協働型見廻りシステムを開発した(ニュースリリース)。
情報通信研究機構(NICT)とソニーセミコンダクタソリューションズは,60GHz帯のミリ波を用いる次世代TransferJet通信技術(TransferJet X)を搭載した自律移動サービスロボットによる協働型見廻りシステムを開発した(ニュースリリース)。
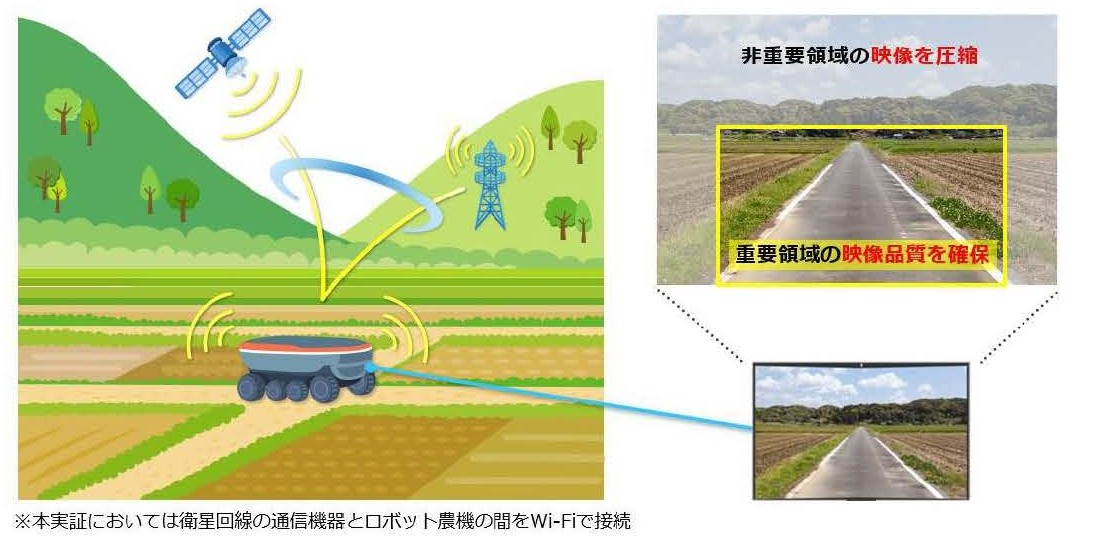
研究グループは,オフィス・ホテル・病院等のビル内や駅・商業施設等の構内で運用される様々な業種のサービスロボットに着目し,これらサービスロボットが人からの依頼を受け,4Kカメラでの撮影による見廻りを行なう自律移動サービスロボット協働型見廻りシステムを開発した。
同一オフィスビル内における実証実験により,見廻り後の撮影データを短時間かつ非接触で見廻り依頼者の再生装置に転送し,自動再生できることを確認した。自律移動サービスロボットを用いた見廻りシステムの実証実験の流れ(一例)は以下の通り。
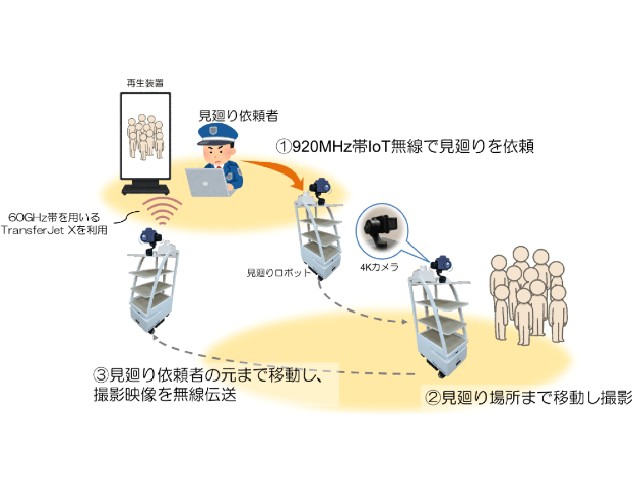
① 見廻り依頼者が,920MHz帯を用いるIoT無線デバイスで,周辺の協力可能な自律移動サービスロボットに見廻りを依頼する。
② 依頼を受け付けた見廻り場所近くのロボットは,指定の見廻り場所まで移動し,搭載されている4Kカメラにより撮影を行なう。
③ 撮影データは,見廻り依頼者の元までロボット自身が運搬し,60GHz帯を用いるTransferJet Xを用いるミリ波IoT無線伝送装置によって再生装置に無線伝送され,自動再生される。
実験では,見廻り依頼者から86.8m離れた見廻り場所における約1分間の撮影データ(約10GB)を,最大移動速度毎秒0.8mのロボットが見廻り場所から依頼者の元まで届け,TransferJet Xによってデータ転送が完了するまで,およそ163秒(移動時間129秒,伝送時間34秒)かかった。
この結果をデータ伝送スループットに換算すると,514Mb/s(撮影データ容量を,見廻り依頼者の元に撮影データの転送が完了するまでの時間で割った数値)に相当する。これは,現在,国内で商用サービスとして利用可能な5Gを用いた場合の技術規格上のデバイス間最大スループット480Mb/sに匹敵する。
なお,この実証実験では,数百m範囲内の2台のサービスロボット間で協調動作を行ない,より見廻り場所に近いロボットへの見廻り依頼や,待合せによる撮影データのロボット間受け渡しも可能なことを確認した。
研究グループは今後,実際のオフィス・ホテル・病院等のビル内や駅・商業施設等の構内といった実環境における実用性検証を,想定されるサービス提供者やビル・駅管理等に関わる企業様の協力を得て実施するとしている。