 佐賀大学と,人工知能・ロボティクス技術のアトラックラボは,共同でARマーカーを活用した屋内でのドローン制御を開発した(ニュースリリース)。
佐賀大学と,人工知能・ロボティクス技術のアトラックラボは,共同でARマーカーを活用した屋内でのドローン制御を開発した(ニュースリリース)。
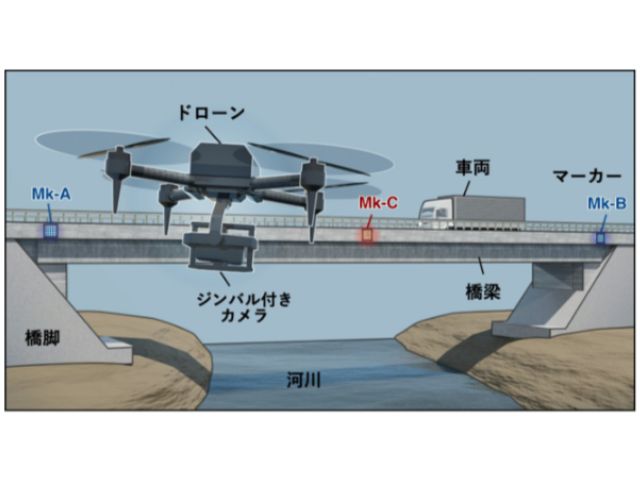
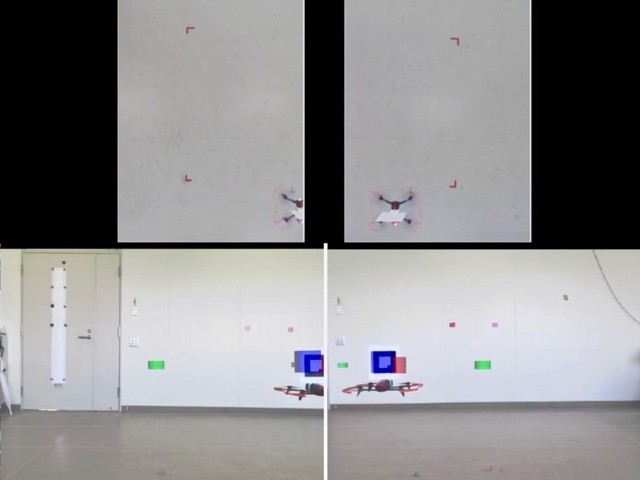
ドローンに搭載したARマーカーを俯瞰カメラによって認識し,ドローンの3次元位置を計測する。さらに,画角が一部分重なるように設置された複数のカメラ映像が一つの空間としてPC上に構築されるため,長い廊下や大規模倉庫など1台のカメラではカバーできない広範囲の空間における自律飛行制御を可能とした。
ARマーカーを用いた制御システムは,佐賀大学が開発,ドローンに実装した。アトラックラボは,ドローンの自律制御や通信などを担当した。
従来,ドローンのGPSを用いない自律飛行制御では,LiDARやステレオカメラが必要だったが,この方式では安価なWEBカメラなどが使用できるため,コスト面でも大きなアドバンテージがあるという。
研究グループは今後,ドローンだけでなく,屋内をUVを用いて消毒したり,ビニールハウスで農薬散布や収穫の援用を行う自律型ローバー(車両型ロボット)の制御など,コストの制限が大きい分野などに応用していくとしている。