 日立オートモティブシステムズは,ミリ波レーダーを搭載することなくステレオカメラ単体で,広い画角により,交差点での衝突被害軽減ブレーキ(AEB:Automatic Emergency Braking)を可能とし,遠方検知を両立させたステレオカメラを開発した(ニュースリリース)。
日立オートモティブシステムズは,ミリ波レーダーを搭載することなくステレオカメラ単体で,広い画角により,交差点での衝突被害軽減ブレーキ(AEB:Automatic Emergency Braking)を可能とし,遠方検知を両立させたステレオカメラを開発した(ニュースリリース)。
世界規模での自動車の普及拡大に伴い,交通事故撲滅に向けた取り組みに対し,さらに関心が集まっている。特に交通事故の多くが交差点で発生していることから,近年,代表的な自動車アセスメント(自動車の安全性能評価)NCAP(New Car Assessment Programme)において,2020年より交差点におけるAEB(衝突被害軽減ブレーキ)が導入されるなど,交差点での安全走行を強化する技術のニーズが高まっている。
交差点での右左折時に衝突可能性のある歩行者などを検出して衝突を回避するためには,広い水平画角をセンシングする技術が必要となる。加えて,センサーの要件として遠方の先行車を検知し続けるには,通常,カメラのセンシング素子であるCMOSを高画素化したり,周辺や遠方を検知するレーダーなど複数のセンサーを組み合わせたりすることが必要だった。
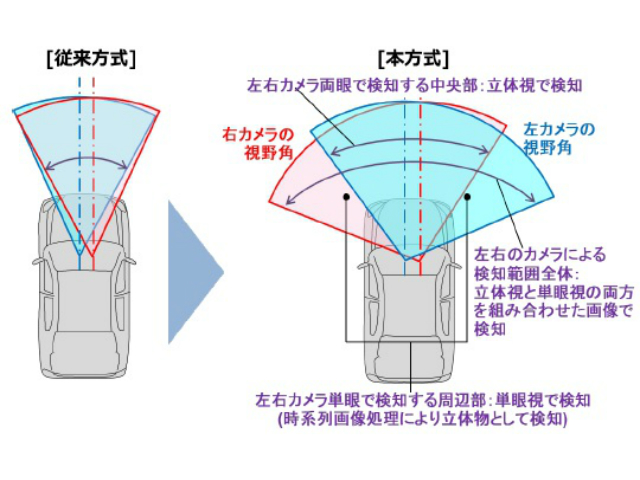
今回開発したステレオカメラでは,ステレオカメラの左右のセンシングを従来よりも広角化するとともに,左右のカメラで検知する画像範囲を左右にずらす方式を採用することで,検知範囲拡大を図った。
これにより,従来からセンシング画素数を大幅に増やすことなくACC(Adaptive Cruise Control)機能の対応可能な遠方検知を維持したまま,交差点右左折時の衝突被害軽減ブレーキが可能となる,従来比約3倍の広画角化を実現した。
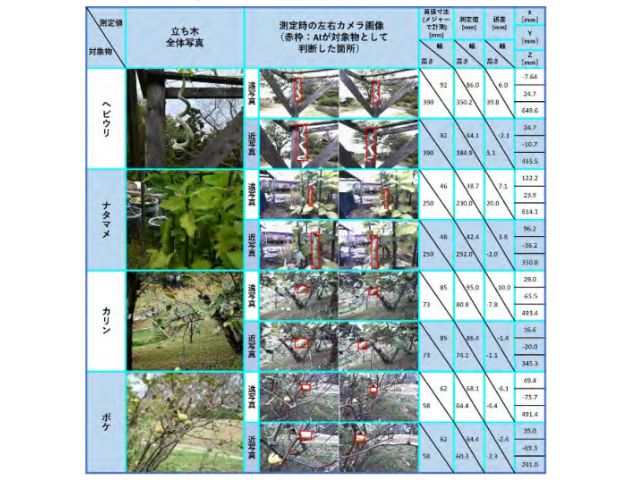
この技術における,検知範囲中央部と周辺部で検知方式を変える技術は,日立製作所の研究グループと共同で開発した。中央部の両眼による立体視検知と,周辺部の時系列画像処理での単眼による立体物検知をシームレスにつなぎ,加えて,予め機械学習の手法で識別パターンを記憶させることで,高い精度で歩行者や自転車を検知し測距することが可能となり,ステレオカメラ単体の最小構成で交差点での安全支援を実現するという。