 ダイナミックマップ基盤は自動走行用高精度3次元地図(HDマップ)整備の効率化・低コスト化の支援ツールの開発に着手する(ニュースリリース)。
ダイナミックマップ基盤は自動走行用高精度3次元地図(HDマップ)整備の効率化・低コスト化の支援ツールの開発に着手する(ニュースリリース)。
自動走行車両の自車位置推定,認識性能を高めるため高精度3次元地図であるHDマップには,従来のドライバーが使用するためのナビゲーションシステム用電子地図では要求されない道路の車線単位の精度が必要となる。
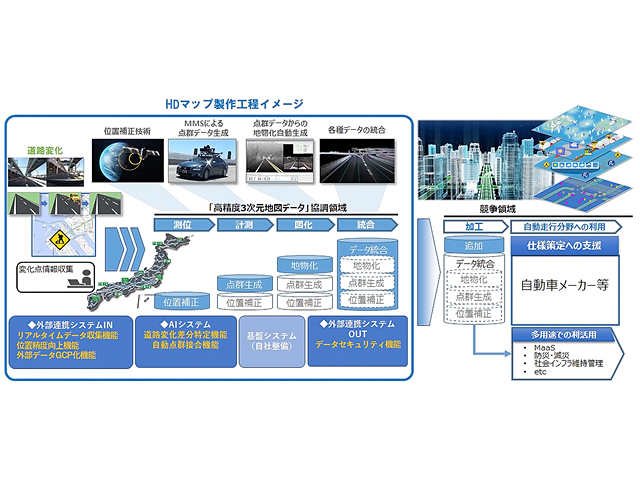
そこで,モービルマッピングシステム(MMS)を用いて,高精度な3次元位置情報(緯度・経度・高さ)が付与されたレーザー点群データとカメラ画像から抽出した車線区画線,路肩,標識などの路上の物体情報を取得し,それらを自動運転システムが活用しやすい構造に統合することが求められている。
しかし,そのため膨大なデータ処理が必要であり,HDマップの協調領域のデータ整備に向けて,維持・更新の更なる効率化・低コスト化が求められている。
そこで,新エネルギー・産業技術総合開発機構(NEDO)の業界横断型AIシステムと業界共用データ基盤の連携開発を支援する「Connected Industries推進のための協調領域データ共有・AIシステム開発促進事業」において,ダイナミックマップ基盤は,HDマップの効率的な維持・更新を実現するために,以下の開発に取り組む。
1)安全・品質を確保した上で計測データの取得・解析・統合を行なうためのシステム開発
・データの不正利用防止のためのセキュリティ機能
・小型で低価格なリアルタイムデータ収集機能(次期MMS技術開発)
・収集したデータの位置精度を所要の精度に変換する機能
・HDマップの精度検証用グランドコントロールポイント(GCP)の設定機能
2)熟練技術者の経験値に頼る部分が大きいHDマップ製作過程におけるリードタイム・コスト削減を目的とした,ディープラーニングなどの最新技術を活用した半自動化・自動化ツールの開発
・道路変化差分特定機能
・点群データ自動接合機能
同社はこの事業を通じて,高速道路・自動車専用道路のHDマップの維持・更新の低コスト化を目指す。また,今後の国内外の一般道路・高速道路・自動車専用道路のHDマップ整備に展開することで,自動走行・モビリティサービスの進展に貢献するとしている。