ネクスティエレクトロニクスは,自動運転基本ソフトウェア「Autoware」と連携できるモデルベース開発ツール「MATLAB®/Simulink®」のRobot Operating System(ROS)ノードの開発を埼玉大学と共同で開始し,ソフトウェア開発プラットフォームのGitHubでオープンソースソフトウェアとして2019年4月16日に公開した(ニュースリリース)。
自動運転の実用化が現実味を帯びる中,自動運転システムに搭載されるソフトウェアは複雑化しており,規模も増大している。それに伴い,開発コストと時間が増大し,これらを削減することが求められている。
ソフトウェア開発の課題を解決するため,近年ではオープンソースソフトウェアを活用し,顧客が要求する機能を早期に実装し,試作と評価の素早い反復を行ない製品リリースするプロセスが試行され,オープンソースの自動運転基本ソフトウェアとして,Linux環境上で動作する「Autoware」の導入が広がっている。
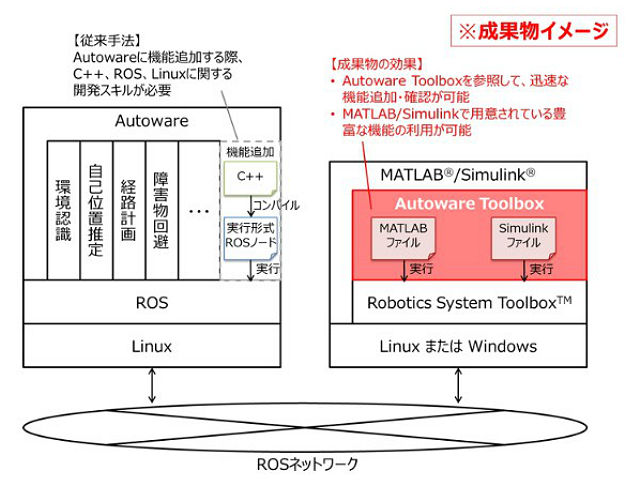
それぞれの機能はROSノードとして実装され,C++言語でプログラミングすることで新たな機能を実装することができる。しかし,Linux環境やC++言語に不慣れな開発エンジニアはその習得に時間を要していた。
そこで,研究グループは,「MATLAB/Simulink」のオプション製品である「Robotics System ToolboxTM」が提供するROSノードとのインターフェースを用いて,「Autoware」と接続可能な「MATLAB/Simulink」のROSノードのサンプルを作成した。
これにより,Linux環境やC++言語に不慣れな開発者の工数削減が可能になる。またさらに導入を加速させるために,「Autoware」と「MATLAB/Simulink」を連携させるサンプルを増やし,これらのサンプルをGitHub上でオープンソースとして公開した。今後もサンプル数を増やし,ドキュメンテーションの充実を図っていくという。
公開したサンプルは,「MATLAB/Simulink」でアルゴリズムを開発するときのリファレンスソフトウェアとして利用可能。また,Windows環境にインストールした「MATLAB/Simulink」で,このサンプルを参考にした自動運転アルゴリズムを開発し,「Autoware」と連携させた迅速な動作確認が可能になる。
また,「MATLAB」にはコンピュータービジョン,機械学習などをサポートするツール群,テストやデバッグをサポートする可視化環境が用意されている。同社は,このサンプルとともに,これらを有効活用することで,自動運転ソフトウェアの開発効率のさらなる向上が期待できるとしている。