東京海洋大学,海洋研究開発機構,島津製作所らの研究グループは,水中無人探査機(ROV)と海底ステーションに光無線通信装置を搭載し,非接触で海底ステーション内に搭載されたカメラとのリアルタイムでのデータ通信,および内部のストレージに保存された映像データを船上装置側のPCに転送することに成功した(ニュースリリース)。
これまでの海洋調査では,海中を航行するロボットや海底に設置した機器との通信には,海中で著しく減衰する電波は使用できず,そのため音波による音響通信が主流。音響通信で伝送できる情報量は数十b/sであることから,画像などの大容量データの転送には通信速度が不十分で,動画の転送などは実質的に不可能だった。
今回の試験は,新たな光無線技術による通信の実用性について検証を行なったもの。従来の指向性の高いレーザー光を使用する空間通信では,光無線通信装置の光軸を厳密に一致させる必要があるが,このシステムではビーム幅の広い光源を使用しており,さらに受光部には高感度で視野の広い光電子増倍管を用いることで,姿勢の保持が難しい水中探査機においても,光軸のズレなどによる通信の質の低下を防ぎ,安定的に通信することが可能となった。
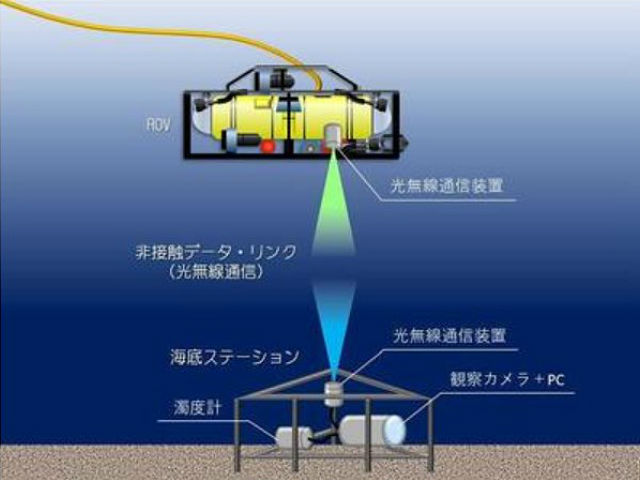
今回の試験で使用した海底ステーションには,光無線通信装置の他に観察用のハイビジョンカメラと濁度計,これら制御するコンピューター,および電源用のバッテリーを搭載している。海底ステーションに接近したROVは,両者の光無線通信装置が対向する位置にて定点保持を行ない,データリンクを行なうことで海底ステーション内のカメラ,およびPCをROVの操縦装置から遠隔で操作することが可能。
今回,新たに開発したシステムにより,ROV操縦盤に接続されたPCから海底ステーション内のカメラにリモートでアクセスすることで,探査機とは離れた場所に設置されたカメラからリアルタイムで海底の映像を取得し観察を行なうことができた。
加えて,海底ステーション内のストレージに保存された約250MBの映像データを約2分間でROV操縦盤のPCに転送することができ,クラゲの仲間が浮遊する姿が確認できた。この結果から,光無線通信装置を用いることでスタンドアローン型の海底モニタリング装置へのリモートアクセス,およびデータの取得が可能となった。
研究グループは,今回の試験において,海底ステーションとのデータリンクに光無線通信装置を使用することで,通信の際に必要となる水中コネクターの接続作業や海底ステーション自体の回収作業が不要となり,大容量データをリアルタイムで取得可能であることを実証したとしている。