オムロン オートモーティブエレクトロニクスは,車の周囲の状況を高精度に計測できる3D-LiDARを開発したと発表した(ニュースリリース)。
オムロン オートモーティブエレクトロニクスは,車の周囲の状況を高精度に計測できる3D-LiDARを開発したと発表した(ニュースリリース)。
現在,車の前方検知用センサーとして主流となっているカメラやミリ波レーダーは,天候や検出物体の性質の影響を受けやすく,ポールや縁石など障害物の多い一般道や市街地での自動運転の実現には,車の周辺状況を高精度に検知できるLiDARセンサーの併用が不可欠とされている。
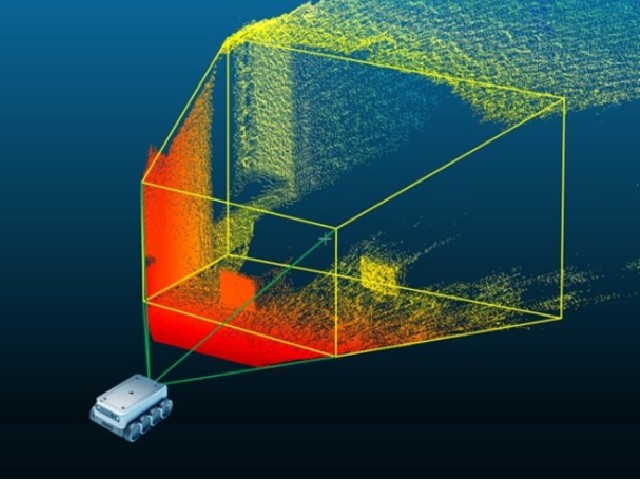
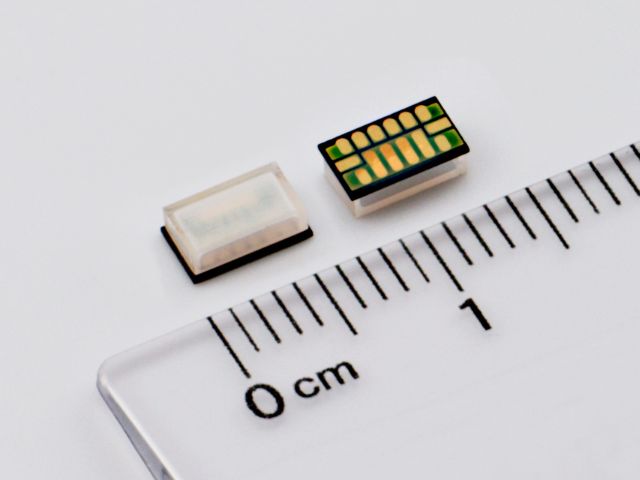
そこで同社は,赤外線レーザーを水平方向にスキャンし,縦方向に分割した多分割受光素子で受光することで,広い視野角(水平140度,垂直20度)と高解像度(水平140ピクセル,垂直32ピクセル)を実現した3D-LiDARを開発した。
この3D-LiDARは,30m先にある縁石や段差など高さ10cm程度の障害物を高精度に計測する。車両メーカーは,この3D-LiDARを用いることで,これまで検出が難しかった低背の様々な障害物を計測し,安全な走行ルートを決定できるシステムの開発が可能となる。
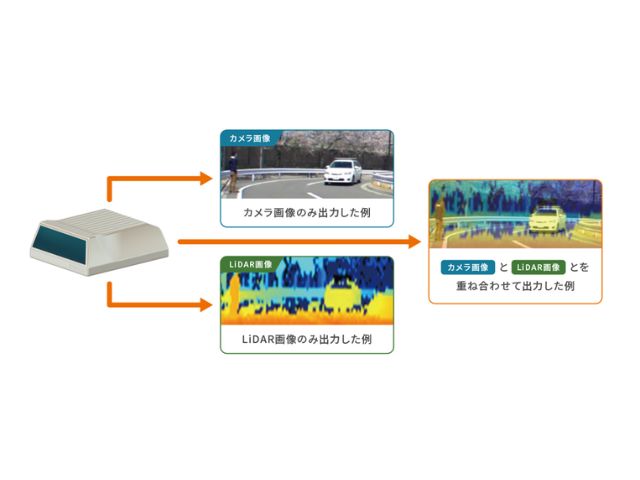
また,3D-LiDARを車両の周囲4か所に取り付け,計測結果を統合・分析することで,車両の360度周囲にいる歩行者や,四輪車,二輪車,縁石などの物体を認識することが可能となる。同社では今後,2020年の量産開始を目指すとしている。